Part 1: Kinematics
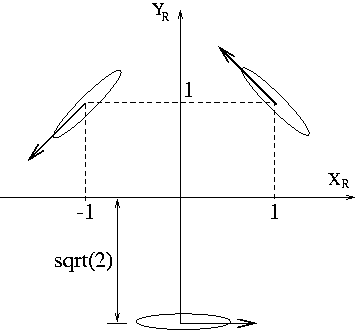
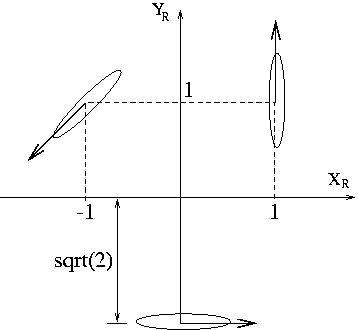
Consider the two robots with fixed standard wheels pictured below. Determine the forward kinematic model for each robot. This requires determining the following:
- The relationship between the roll speeds of the wheels and the robot’s velocity in the robot reference frame
- Any constraints on the robot’s motion
You should also describe in words the type of movement that each robot is capable of. You may assume all wheels have radius r.
|
|
Your solution should be written neatly and should show your workings, the solution (including any constraints on motion), and a description of the robot’s mobility. You should employ Gauss-Jordan elimination.