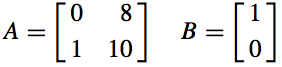
- Consider the following system (the same as in assignment 5, question 4):
 C = [1 0]
Apply state feedback with integral control on this system. Determine the desired gain values to set two of the eigenvalues of the closed-loop system dynamics matrix A – BK to -1 ± j. The third eigenvalue of the closed-loop system should be placed on the real axis at -10. You should again confirm your answer by checking that A* – B* K has the desired eigenvalues.
C = [1 0]
Apply state feedback with integral control on this system. Determine the desired gain values to set two of the eigenvalues of the closed-loop system dynamics matrix A – BK to -1 ± j. The third eigenvalue of the closed-loop system should be placed on the real axis at -10. You should again confirm your answer by checking that A* – B* K has the desired eigenvalues. - Consider that integral control incorporates a pole at s=0 prior to the system plant in a unity feedback system as depicted below:
 In this case the plant’s transfer function G(s) has no zeros, but some arbitrary characteristic polynomial den(s). Use block diagram reduction (from 5821) to construct the closed-loop transfer function for the whole system. Then try and show that s=0 will not generally be a pole of the closed-loop system.
In this case the plant’s transfer function G(s) has no zeros, but some arbitrary characteristic polynomial den(s). Use block diagram reduction (from 5821) to construct the closed-loop transfer function for the whole system. Then try and show that s=0 will not generally be a pole of the closed-loop system. - For each of the following (A, C) pairs determine the observer gain vector L required to set the eigenvalues of the observer dynamics matrix A – LC to the given values. Use Bass-Gura if you have to, but otherwise try and recognize whether the A matrix is in observer canonical form so that the L vector is obtained directly. In each case you are encouraged to confirm (perhaps using Matlab) that A – LC has the desired eigenvalues.(a)
 (b)
(b) 
- Give the difference equation that corresponds to the transfer functionY(s)/U(s) = (6 + z)/(z^3 + 4z^2)
- Find the discrete-time state space representation for the following difference equations:(a) y(k) = 10 y(k-1) + 2 u(k-1) [The answer is so direct that this easy problem may appear tricky. Remember that scalars are matrices too!] (b) y(k) = 4 y(k-2) – 2 y(k-1) + u(k-1)
Assignment 6
Due: In class (@ 10:00) on 29 July