Computer Science 3600, Winter '25
Course Diary
Copyright 2025 by H.T. Wareham
All rights reserved
Week 1,
Week 2,
Week 3,
Week 4,
Week 5,
(In-class Exam #1 Notes),
Week 6,
Week 7,
Week 8,
Week 9,
(In-class Exam #2 Notes),
Week 10,
Week 11,
Week 12,
(Final Exam Notes),
Week 13,
Week 14,
(end of diary)
Tuesday, January 7
- Intructor ill; lecture cancelled.
Thursday, January 9 (Lecture #1)
[Sections 1.1-1.2]
- Introduction to course; dates and conventions.
- Background: Problems and Algorithms
- Computational Problems
- A computational problem is a relation between inputs and
outputs.
- Types of computational problems.
- By type of output:
- Decision problem: Returns a Boolean value
(typically the answer to a question about
the optimal solution for a given instance of
a problem).
- Cost / Evaluation problem: Returns a number
(typically the cost of an optimal solution for
a given instance of a problem).
- Example / Solution problem: Returns a structure
(typically an optimal solution for
a given instance of a problem).
- Example: Versions of the Shortest Path
problem:
Shortest Path (Unweighted) [Decision]
Input: A graph G = (V,E), two
vertices u and v in V, and a positive integer k.
Question: Is there a path P in G from u to v such
that the number of edges in P is <= k?
Shortest Path (Unweighted) [Evaluation]
Input: A graph G = (V,E) and two
vertices u and v in V.
Output: The length of the path in G from u to v
with the smallest possible number of edges.
Shortest Path (Unweighted) [Solution]
Input: A graph G = (V,E) and two
vertices u and v in V.
Output: A path P in G from u to v such that
the number of edges in P is the smallest possible.
- By entities in I/O relation:
- Discrete problem: Manipulates integers
and/or discrete structures.
- Numerical problem: Manipulates
(arbitrary-precision) real
numbers in addition to integers and/or
discrete structures.
- This course will focus on various discrete problems.
In particular, we will be looking at a number of
discrete problems in which we are looking for a
substructure of a given structure that is optimal
relative to some function (combinatorial
optimization problems).
- Guidelines for defining computational problems
- Strike balance between abstraction, formalization,
and phrasing in terms of stated entities -- the
former exposes the mathematical structures
underlying a problem, the latter keeps the problem
relevant.
- Abstraction useful as it may show that your problem
is the same as one that has already been solved
=> The first rule of algorithm design is don't <=
- Make sure that the problem you defined and subsequently
will be working on is the one you actually need to
solve, e.g., checking possibility of vs checking
costs of vs checking routes for airline flights.
- Example: Bob's Trucking Company.
- Examine contents of all depots in a shipping network
=> graph traversal (assuming shipping network can be
modeled as a graph in which vertices are depots and
edges are routes).
- Minimizing costs associated with deliveries =>
shortest paths (# edges / summed edge-lengths)
Shortest Path (Unweighted)
Input: A graph G = (V,E) and two
vertices u and v in V.
Output: A path P in G from u to v such that
the number of edges in P is the smallest possible.
Shortest Path (Weighted)
Input: An edge-weighted graph G = (V,E,W) and two
vertices u and v in V.
Output: A path P in G from u to v such that
the sum of the weights of the edges in P is the
smallest possible.
- Maximizing reimbursements associated with deliveries
=> longest paths (# edges / summed edge-lengths)
Longest Path (Unweighted)
Input: A graph G = (V,E) and two
vertices u and v in V.
Output: A path P in G from u to v such that
the number of edges in P is the largest possible.
Longest Path (Weighted)
Input: An edge-weighted graph G = (V,E,W) and two
vertices u and v in V.
Output: A path P in G from u to v such that
the sum of the weights of the edges in P is the
largest possible.
- Maximizing the value of items loaded on a truck with
a specified maximum capacity, where truck must carry
all or none of each item => 0/1 Knapsack
0/1 Knapsack
Input: A set U of items, an item-size
function s(), an item-value function v(), and
a positive integer B.
Output: A subset U' of U such that the
sum of the sizes of the items in U' is less
than or equal to B and the sum of the values of
the items in U' is the largest possible.
- Minimizing the number of emergency aid depots
required in a shipping network such that at least
one of the endpoints of each route has such a
depot => Vertex Cover
Vertex Cover
Input: An undirected graph G = (V,E).
Output: A subset V' \subseteq V such that
for all edges (u,v) \in E, at least one of u and v is
in V', and the size of V' is the smallest possible.
- Algorithms
- An algorithm for a problem is a finite sequence of
instructions relative to a particular computer-model
that, given an input for that problem, computes the
corresponding output.
- This is the classicial definition of an algorithm.
- Such algorithms are hand-crafted by human beings and
are not the same as procedures developed
by computational methods (e.g., backpropogation,
reinforcement learning) that are encoded in particular
devices (e.g., neural networks), e.g. social media
content choice algorithms, ChatGPT.
- Types of algorithms.
- By mode of algorithm creation: hand-crafted vs
machine-crafted.
- By type of computer-model:
- Instruction execution mode: Deterministic /
Randomized / Nondeterministic
- Number of processors: Serial (single processor)
/ Parallel (multiple processors)
- By type of computation: Discrete / Numerical.
- This course will focus on hand-crafted deterministic
serial discrete algorithms.
- There are typically many possible algorithms for a
particular problem. Which algorithm should we use?
Perhaps we
should use the one that is most efficient -- this,
however, requires a useful and usable measure
of algorithm efficiency ... This will be the topic of
our next lecture.
- Potential exam questions
Tuesday, January 14 (Lecture #2)
[Sections 2.1-2.2 and 3.1]
- Background: Time Complexity
- Algorithms as technology: Algorithms are at
least as (and sometimes more) important to efficient
computing than traditional electronic technologies like
microprocessors and memory chips (Jim Dawe's Bonus, Need's
Video Sorting).
- Desirable properties of a measure of algorithm efficiency:
- Machine independent.
- Function of input size.
- Useful for both assessing individual and comparing groups
of algorithms.
- Mathematically tractable, i.e., can be derived
(relatively) easily for any algorithm.
- For most of this course, we will focus on efficiency wrt
algorithm running time; however, we will occasionally mention
other measures, i.e., space (computer memory).
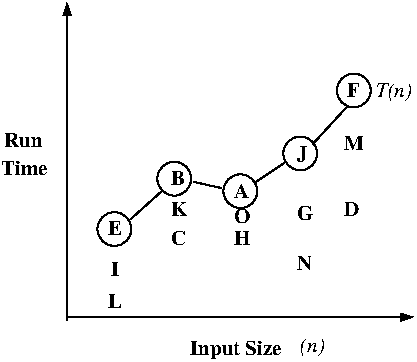
- The road from actual running time to asymptotic worst-case time
complexity -- necessary lies (or rather, abstractions):
|
|
C(x) |
|
T(n) |
|
T(n) |
|
O(g(n)) |
|
| Actual |
|
Abstract |
|
(Exact) |
|
Worst-Case |
|
Asymptotic |
| Running |
-----> |
Running |
-----> |
Time |
-----> |
Time |
-----> |
Worst-Case |
| Time |
|
Time |
|
Complexity |
|
Complexity |
|
Time |
|
|
|
|
|
|
|
|
Complexity |
|
|
Instruction |
|
Input Size |
|
Worst-Case |
|
Asymptotic |
|
|
Counts |
|
|
|
Selection |
|
Notation |
- Let's look at various concepts and techniques mentioned above
in more detail.
- Counting instructions
- Motivated by the need for "machine" (computer hardware /
operating system, programming language) -independent
measure of algorithm efficiency.
- Basic instructions in a program can have a wide range
of running times. Can indicate this in an analysis
by assigning a separate constant for the running time of
each kind of instruction; is accurate, but very
cumbersome.
- We will assume that each kind of basic instruction runs
in 1 time unit. Is not accurate but does simplify
analyses; moreover, can be justified by our ultimate
focus on asymptotic time complexity.
- We will assume a RAM model of memory in which all
stored elements are accessible in 1 time unit. Is not
accurate, as we ignore memory hierarchy; however,
does simplify analyses.
- Input size.
- Motivated by the need to organize set of
instruction-counts over the space of all inputs.
- Assumes a "reasonable" encoding of inputs,
e.g., numbers stored in binary (pages 1055-1057; see
also Chapter 2, Garey and Johnson (1979)).
- Isolate one or more parameters that describe
amount of memory used to store input, e.g., length of
a given list, the number of vertices in a given graph.
- Hard to define formally; acquired informally via
experience doing time complexity analyses.
- We will assume where possible that we are dealing with
small numbers in the input that fit inside a single
computer-memory "word"; hence, the size of numbers in
the input need not be a parameter in the input size.
- Time Complexity
- Worst-Case Time Complexity
- Programs involving loops and simple statements
naturally give time complexity functions such
that every input of a particular size runs in
the same time; unfortunately, once we allow arbitrary
while and if-then-else statements,
different inputs of the same size may run in
different times, e,g., sorting algorithms
on sorted and unsorted lists of the same length.
- Need to summarize set of running times for each
input size s by a single number. There are
three options:
- Best-case, e.g., lowest running time
over all inputs of size s; easy to
compute but not that useful in practice.
- Average-case, e.g., average running time
relative to some probability distribution
over all inputs of size s;
useful in practice but hard to compute.
- Worst-case, e.g., highest running time
over all inputs of size s; easy to
compute and useful in practice -- moreover,
simplifies analyses (see rule for
if-then-else below).
- Worst-case time complexity functions are both useful
and usable; hence, are most commonly in practice.
- if-then-else-statement rule:
max(if-body, else-body) + 1
- Example: Two analyses of Example Algorithm #3
(tc_examples_1.txt)
- Example: the linear and binary search
algorithms (tc_searching.txt)
- Example: the bubble and insertion sort
algorithms (tc_sorting.txt)
- Asymptotic notation
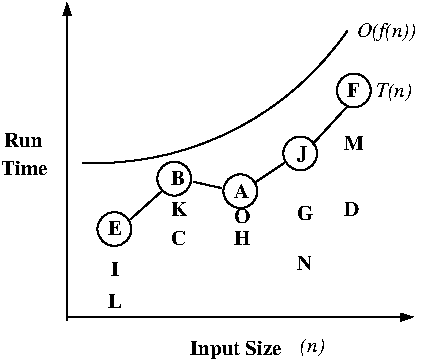
- Used to smooth and simplify time complexity
functions; assumes input size goes out to infinity,
and that simplification can be stated in terms of
"essential" behavior of function in the limit.
- What makes a function g(n)) a useful and
smooth upper bound of a time complexity function
function g(n) ?
Note that we have re-derived the definition of
big-Oh asymptotic upper-bound notation by
combining the mathematical requirements of a useful
smoothing function.
- Asymptotic upper bounds: Big-Oh notation
(O(g(n))).
- Example: T(n) = 3n^2 + 4n + 5 is O(n^2)
(big_Oh.txt)
- One could derive the required constant c by fancy
algebra; I prefer to set c to the sum of the
positive coefficients -- it's very dirty but it's
also quick.
- Example: T(n) = 3n^2 + 4n + 5 is not O(n)
(big_Oh.txt)
- Try to avoid ludicrously loose upper bounds.
- Example: T(n) = 2n is O(n^57)
- Relationship between informal "T(n) is O(g(n))" definition
and "O(g(n)) as the set of all g(n)-upper-bounded functions"
definition given in textbook; keep the latter in mind,
but the former is colloquial CS usage. May stem from
algorithm-centric and math-centric views of asymptotic
notation, respectively.
- Asymptotic lower bounds: Omega notation
(OMEGA(g(n))).
- Example: T(n) = 3n^2 + 4n + 5 is OMEGA(n^2)
(big_OMEGA.txt)
- Example: T(n) = 3n^2 + 4n + 5 is not OMEGA(n^3)
(big_OMEGA.txt)
- Try to avoid ludicrously loose lower bounds.
- Example: T(n) = 2n^57 is OMEGA(n)
- Asymptotic exact bounds: Theta notation
(THETA(g(n))).
Thursday, January 16 (Lecture #3)
[Section 3.1; Class Notes]
- Background: Time Complexity (Cont'd)
- Asymptotic notation (Cont'd)
- Three caveats on using asymptotic notation:
- How you interpret asymptotic notation depends on how
the function T(n) was derived. If T(n) is an exact
value for all inputs of a size n, then can say
T(n) = O(g(n)) (OMEGA(g(n))) [THETA(g(n))] means
"the running time is upper (lower) [exactly] bounded
by g(n)"; however, if T(n) is merely an upper bound
on the running time (as has been the case in our most
recent
examples), must be more careful in interpreting
OMEGA and THETA statements.
- Though it is in a sense an abuse of notation, you
will frequently see O(1) or THETA(1) used to indicate
an unspecified constant in various expressions.
- The rules about combining separate asymptotic-notation
expressions are tricky; be VERY careful if you ever
do this in your math -- it might be better off to
write out the full constant-bounds and work with those,
so you don't make mistakes.
- Guidelines for deriving asymptotic worst-case time
complexity functions (non-recursive algorithms)
- If you have a worst-case time complexity function
on hand, the leading term (minus coefficient) is
usually the asymptotic worst-case time complexity
function.
- Example: Though the selection, bubble, and insertion
sort algorithms run in T(n) = 4n^2 - 2,
T(n) = 7n^2 - 3n + 2, and
T(n) = 3n^2 - 1 time, respectively, all of these
algorithms run in O(n^2) time.
- As constants associated with different loops and
different numbers of embedded simple statements
vanish into the leading constant c in the definition
of asymptotic notation, can often derive a
near-optimal asymptotic worst-case time complexity
function by simply multiplying out the number of
iterations for each loop in the deepest chain of
nested loops.
- Example: As both the insertion and selection
sort algorithms consist of a pair of nested loops,
each of which has at most n iterations, both
algorithms run in O(n * n) = O(n^2) time.
- The usual way to handle nested if-then-else
statements is to assume the largest sub-case
always executes. However, if you have a function
describing how often the conditional is true, you
may be able to do better, e,g., derivation
of O(|V| + |E|) time complexity for breadth-first
graph traversal algorithm (see also the second
analysis of Example Algorithm #3).
- Parameterized time-complexity expressions
- If you are ever confronted with an algorithm which
uses operations of unspecified time complexity,
build a parameterized time-complexity expression
and solve this expression as necessary when you are
given the time complexities of those operations.
- Example: Parameterized versions of Example Algorithms #1 and #2
(tc_param.txt)
- A particularly useful variant of such expressions are
asymptotic worst-case parameterized time-complexity
expressions, i.e., simplified big-Oh worst-case
versions of parameterized time-complexity expressions.
- Very useful if algorithm incorporates conditional
and/or conditional-loop statements.
- Derive using the same techniques as you use to
derive asymptotic worst-case time complexity
expressions modulo the inclusion of variable-terms
for unknown operation time complexities.
- If the term X indicating the execution of the
deepest nested loop statements is the same as the term
in front of one of unknown-procedure runtimes then
ignore X, e.g., O(n^2T(P1) + nT(P2) + n^2) =>
O(n^2T(P1) + nT(P2)).
- If the term X indicating the execution of the
deepest nested loop statements is greater than the term
in front of one of unknown-procedure runtimes then
leave X in the expression, e.g.,
O(n^2T(P1) + nT(P2) + n^3) =>
O(n^2T(P1) + nT(P2) + n^3).
- Example: The asymptotic worst-case parameterized
time-complexity expressions for Example Algorithms
#1 and #2 in the previous example are
O(nT(P1)) and O(n^2T(P2) + nT(P1)), respectively.
- Very nice when you are evaluating an algorithm that
uses a set
of operations and that set of operations is supported
(albeit with different time complexities) by each of a
set of data structures -- one derives the parameterized
"generic" time complexity for the algorithm and then
you derive the time complexity relative to each of the
data structures (by filling in the time complexities for
the operations relative to that data structure).
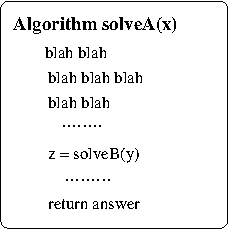
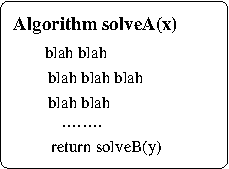
- Also very nice for relating two problems. Suppose
a problem P1 can be solved by an efficient,
i.e, (asymptotic worst-case) polynomial time,
algorithm
that invokes a procedure that solves instances of a
problem P2, i.e.,
P1(n):
blah blah blah
x = P2(n)
blah blah blah
output z
This has several implications:
- If P2 is efficiently solvable than so is P1
(simply substitute the efficient algorithm for
P2 into the algorithm for P1 described
above) .
- If P1 is not efficiently solvable than neither
is P2 (if P2 was efficiently solvable, you
could substitute that algorithm into the
algorithm above for P1 to create an efficient
algorithm for P1, which is a contradiction).
The former is the reason why we create efficient
libraries of commonly-called algorithms; as we shall
see in the final section of this course, the latter
is the basis for showing that a problem does not
have an efficient algorithm.
- Potential exam questions
- Algorithm Design Techniques
- Combinatorial optimization problems redux
- Each solution associated with an instance of a
combinatorial optimization problem has
a cost, and we want the solutions of optimal
(min/max) cost over the whole solution space.
- Any time you have a problem of the form "Find
the best X" where X is some discrete structure,
chances are you're dealing with a combinatorial
optimization problem.
- Distinguish several types of solutions:
- Candidate solutions = all possible solutions to
the instance, e,g., all possible
edge-sequences of a given graph that start with
vertex u and end with vertex v.
- Viable solutions = all potentially optimal
candidate solutions, e.g., all
edge-sequences of a given graph that are paths
between vertices u and v.
- Optimal solutions = those viable solutions that
have optimal value relative to the cost
function over the set of viable solutions,
e.g., all paths in a given graph between
vertices u and v that have the
smallest number of edges over the space of
all such paths.
- Each such problem instance has a combinatorial,
i.e., exponential in instance size, candidate
(and often
viable) solution space -- the job of an algorithm
is to to find the optimal solutions in this space
(of which there will always be at least one).
- Sometimes, you can't generate viable solutions --
you have to generate all candidate solutions and
check viability along the way.
- Example: The 0/1 Knapsack problem
- Candidate solutions = subsets of U.
- Viable solutions = subsets of U whose summed size
is <= B.
- Optimal solutions = subsets of U whose summed size
is <=B and whose summed value is maximum over the
space of viable solutions.
- Each subset U' can be modeled as a binary vector
of length |U| (v_i = 1 (0) => item i is (not) in
U'); hence, there are 2^{|U|}
candidate solutions for any instance of 0/1 Knapsack.
- Sometimes, you can generate viable solutions
up front -- this depends in part on your ingenuity.
- Example: The Longest Common Subsequence problem
Longest common subsequence (LCS)
Input: Two strings s, s' over an alphabet
Sigma.
Output: All strings s'' over Sigma such that s'' is
a subsequence of both s and s' and the length of
s'' is of is maximized over the solution space.
- Candidate solutions = all possible strings over
alphabet Sigma of length <= min(|s|,|s'|).
- Viable solutions = all subsequences of the shorter
given string.
- Optimal solutions = all subsequences of the shorter
given string that are also subsequences of the
longer given string and have the maximum length over
the space of viable solutions.
- Each subsequence s'' can be modeled as a binary
vector of length min(|s|,|s'|) (v_i = 1 (0) =>
symbol i is (not) included in the subsequence);
hence, there are
O(2^{min(|s|,|s'|)}) viable solutions for any
instance of LCS (note that this worst case only
occurs if each symbol in s and s' only occurs once).
- Sometimes even the set of viable solutions is
dauntingly large (like, REALLY large).
- Example: The Minimum Spanning Tree problem
Minimum spanning tree (MST)
Input: An edge-weighted graph G = (V, E, w).
Output: All spanning trees T of G, i.e., trees
that connect all vertices in G, such that the sum
of the weights of the edges in T is minimized
over the solution space.
- Candidate solutions = all (|V| - 1)-sized subsets of
the edges of G.
- Viable solutions = all (|V| - 1)-sized subsets of the
edges of G that are spanning trees of G.
- Optimal solutions = all spanning trees of G that have
minimum summed edge-weight over the space of
viable solutions.
- By Cayley's Theorem, a graph G = (V, E) has
O(|V|^{|V| - 2}) spanning trees (the worst case
here is when G is a complete graph); hence, there
are O(|V|^{|V| - 2}) viable solutions for any
instance of MST.
- Can solve combinatorial optimization problems by
looking at all (candidate/viable) solution and
saving those of the optimal cost (which we can
determine on the fly by saving those solutions
with the best cost we've seen so far at any point
in the enumeration of all solutions).
- This is inherently inefficient given the exponential
sizes of the (candidate/viable) solution spaces
involved. Can we do better?
- We most certainly can. Consider MST; though the
set of viable solutions for each instance of
MST is potentially exponentially large, we can
solve all instances of MST in
low-order polynomial time.
- How good we can do algorithm-wise depends on
how much of the (candidate/viable) solution
space our algorithm can ignore. Over the next
8 lectures, we'll examine a set of techniques
for doing this whose applicability depend on
some fairly simple properties of problem
solution-spaces.
- Combinatorial Solution-Space Trees (Sections 9.1-9.7, B&B)
- The most basic approach to solving combinatorial
optimization problems in which we are interested in
finding a subset SS' of a given set SS such that
c(SS') is optimal relative to some solution-evaluation
function c().
- As a first step, simplify generation of solutions
for a problem instance by using a combinatorial
solution-space tree (CST).
- In such a tree, internal nodes are partial
solutions and the full solutions labeling the
leaves comprise the solution space.
- The simplest such trees are binary, and each
of the |SS| levels in the tree effectively
decides whether or not to add a particular
item in SS to the solution
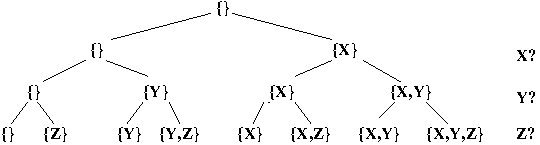
- Example: A CST for an instance of 0/1 Knapsack
in which SS = U = {X, Y, Z} and |SS| = |U| = 3:
Tuesday, January 21 (Lecture #4)
[Class Notes]
- Algorithm Design Techniques (Cont'd)
- Combinatorial Solution-Space Trees (Cont'd)
- One can vary the items added at each CST level to
construct different types of solutions for different
problems.
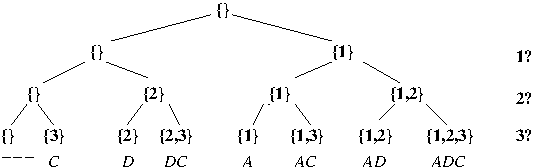
- Example: A CST for an instance (s = ABAACA, s' = ADC) of Longest common subsequence
in which SS = {1, 2, 3}, i.e., positions in the shorter given string (in this case, s') and |SS| = |s'| = 3:
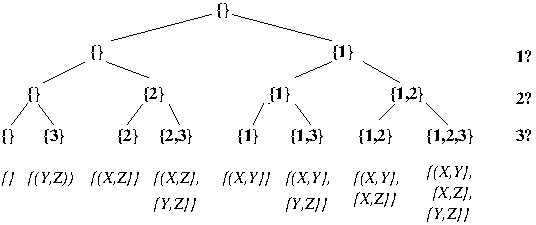
- Example: A CST for an instance (I = {X, Y, Z},
S = {{X, Y}, {X, Z}, {Y, Z}}) of Set
cover (see Assignment #1)
in which SS = {1, 2, 3}, i.e., the numbers of the subsets of I in S, and |SS| = |S| = 3:
- Can traverse such a tree and examine all of its
leaves using depth-first search (DFS) or
breadth-first search (BFS). Only those leaves
corresponding to viable solutions are important.
- Example: Viability conditions for
0/1 Knapsack, LCS, and MST.
- Do items in partial solution fit in
knapsack? (0/1 Knapsack)
- Is partial solution string a subsequence of
both given sequences? (LCS)
- Do edges in partial solution form a forest?
(MST)
- As a second step, decrease space requirements by
operating on an implicit CST, i.e., generate tree
nodes as necessary during traversal.
- ALGORITHM: DFS-based traversal
of implicit CST (minimization version) [ASSIGNMENT #1]
1. DFS-I(i, sol)
2. if (i == n + 1)
3. if (viable (sol))
4. return(cost(sol))
5. else
6. return(INFINITY)
7. else
8. return(min(DFS-I(i + 1, sol),
9. DFS-I(i + 1, sol U item[i])))
- Initial call: DFS-I(1, empty set)
- Note that n is the number of items in the
set in the instance; hence "i == n + 1" means
that you have reached a leaf in the CST.
- ALGORITHM: BFS-based traversal
of implicit CST (minimization version).
1. BFS-I()
2. Q = {(1, empty set)}
3. best = INFINITY
4. while not empty(Q)
5. (i, sol) = pop(Q)
6. if (i == n + 1)
7. if (viable(sol))
8. best = min(best, cost(sol))
9. else
10. push(Q,(i + 1, sol))
11. push(Q,(i + 1, sol U item[i]))
12. return(best)
- Modifications:
- To make the above work for maximization
problems, change min to max and INFINITY
to -INFINITY.
- To obtain optimal solutions, the simplest way
is to run a second tree-traversal that
takes the optimal cost produced previously
as a parameter and stores / prints all
viable solutions with that cost.
- Example: Execution of DFS-based traversal
of implicit CST for 0/1-Knapsack when
U = {X,Y,Z}, s(X) = 4, s(Y) = 2, s(Z) = 1,
v(X) = 4, v(Y) = 5, v(Z) = 3, and B = 4:
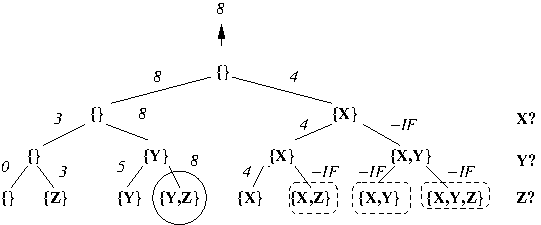
Note that optimal leaf-solutions are circled
and non-viable leaf-solutions are enclosed in
dashed boxes.
- INTERLUDE: A look at the mechanics of
Assignment #1.
- This is all well and good; however, we are still
looking at every node in the tree, and as this
tree is of exponential size, our algorithm runs
in exponential time. Can we do better? Yes we can!
- As a third step, where possible, use information
about partial solution viability and potential
optimality to terminate search of unfeasible
subtrees of the CST (dynamic pruning).
- Traditionally, DFS + dynamic pruning is known as
backtracking and BFS + dynamic pruning
is known as branch and bound.
- Dynamic pruning works in CST because all
"full" candidate solutions that incorporate
a particular particular partial solution are
leaves in the subtree rooted at the node
corresponding to that partial solution; hence,
non-viability / non-potential-optimality of a
partial solution implies the non-viability /
non-potential-optimality of all solutions in the
subtree rooted at the node corresponding to that
partial solution!
- Example: Potential optimality
conditions for 0/1 Knapsack, LCS, and MST.
- Does sum of values of items in partial
solution plus sum of values of all remaining
items that could be added exceed the
value of the best solution seen so far?
(0/1 Knapsack)
- Does the length of the partial solution
string plus the length of the string of
all remaining characters that could be
added exceed the length of the best
solution string seen so far? (LCS)
- Is the sum of the weights of the edges in
the partial solution less than the
cost of the best solution found so far?
(MST)
- ALGORITHM: DFS-based traversal
of implicit CST + dynamic pruning (minimization version).
1. DFS-IP(i, sol, best)
2. if (not viable(sol)) or (best < cost(sol))
3. return(INFINITY)
4. else if (i == n + 1)
5. best = min(best, cost(sol))
6. return(cost(sol))
7. else
8. return(min(DFS-IP(i + 1, sol, best),
9. DFS-IP(i + 1, sol U item[i], best)))
- Initial call: DFS-IP(1, empty set, BEST) where
BEST is an object encoding the integer
INFINITY.
- Note that variable BEST is passed by reference,
e.g., it is a pointer to an integer; if it is
passed by value, the value of BEST is not
saved from any of the leaf-evaluations.
ALGORITHM: BFS-based traversal
of implicit CST + dynamic pruning (minimization version).
1. BFS-IP()
2. Q = {(1, empty set)}
3. best = INFINITY
4. while not empty(Q)
5. (i, sol) = pop(Q)
6. if (viable(sol) and (cost(sol) < best))
7. if (i == n + 1)
8. best = min(best, cost(sol))
9. else
10. push(Q,(i + 1, sol))
11. push(Q,(i + 1, sol U item[i]))
12. return(best)
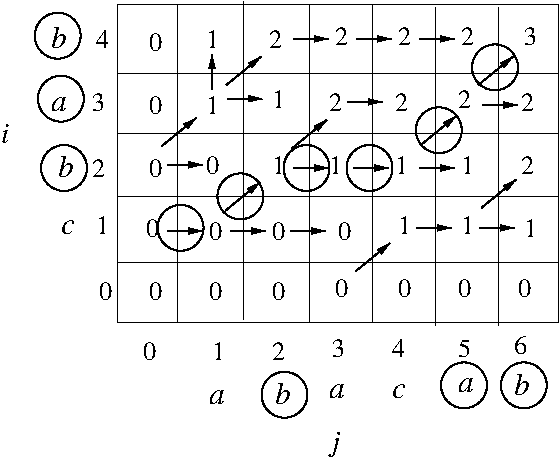
Example: Execution of DFS-based traversal
of implicit CST for 0/1-Knapsack with
dynamic pruning based on non-viability when
U = {X,Y,Z}, s(X) = 1, s(Y) = 3, s(Z) = 2,
v(X) = 1, v(Y) = 4, v(Z) = 2, and B = 3:
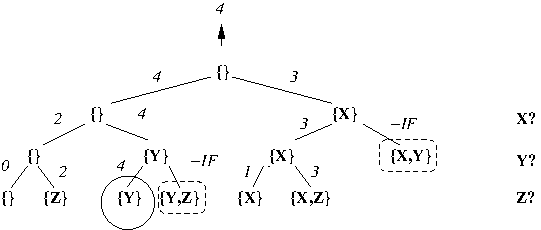
Note that optimal solutions are circled
and non-viable solutions are enclosed in
dashed boxes.
Example: Execution of DFS-based traversal
of implicit CST for 0/1-Knapsack with
dynamic pruning based on both non-viability
and non-potential optimality when
U = {X,Y,Z}, s(X) = 1, s(Y) = 3, s(Z) = 2,
v(X) = 1, v(Y) = 4, v(Z) = 2, and B = 3:
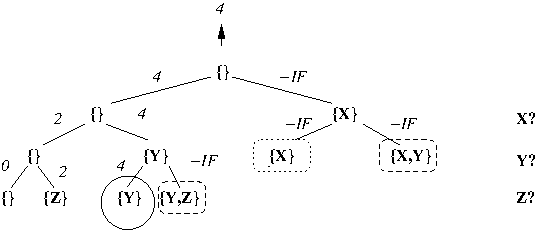
Note that optimal solutions are circled
and non-viable (non-potential optimal) solutions are
enclosed in dashed (dotted) boxes.
Such tricks can (but may not always) drastically reduce
actual running times for CST traversal.
Food for Thought:
- Can we do better in practice runtime-wise if we only require one
optimal solution? How about in the worst case?
- Can we do better in practice runtime-wise if we require all
optimal solutions? How about in the worst case?
Potential exam questions
Thursday, January 23 (Lecture #5)
[Sections 2.3.1, 4.2, and 15.3-4; Class Notes]
If we are lucky, there are a polynomial number of
distinct subproblems. If we
are really lucky, we can use the recurrence to solve
these subproblems in a "bottom up" rather than a
"top down fashion", solving the smallest subproblems
first and solving progressively larger subproblems
until we solve the original problem instance.
Dynamic programming (DP) => table-driven, bottom-up
recursive decomposition algorithms!
The Dynamic Programming Cookbook:
- Step 1: Find a recurrence / recursive decomposition
for the problem of interest; this includes
approprtiately defining the problem of
interest.
- The subproblems typically ask for the cost
of an optimal solution to a subproblem.
- Step 2: Lay out the distinct subproblems in a
table.
- Step 3: Fill in the base-case values in the table.
- Step 4: Run the recurrence "in reverse" / in a
bottom-up fashion, using smaller solved
subproblems to solve larger subproblems, until the
table is filled in.
- This fillin typically includes information
about the choice(s) made in solving a
subproblem (backpointers) that is
used in Step 5.
- Step 5: Use traceback on backpointers starting
from the optimal-cost table entry for the
original subproblem of interest
to reconstruct one or
more optimal solutions for that problem.
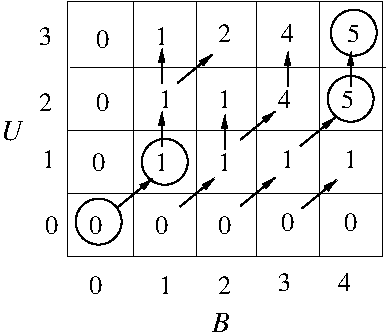
Example: DP algorithm for Longest Common
Subsequence (LCS)
- Recursive decomposition
- Given strings s and s' over some alphabet,
D(i,j) = length of longest common
subsequence of first i characters of
s and first j characters of s'.
- Two recursive cases:
- ith character of s and jth character
of s' are the same.
- jth character of s and jth character
of s' are different.
- Recurrence (recursive + base cases)
- Case 1: D(i,j) = D(i - 1, j - 1) + 1 for i, j > 0
- Case 2: D(i,j) = max(D(i, j - 1),
D(i - 1, j)) for i, j > 0
- D(i,0) = D(0,j) = 0 for i, j >= 0
- Matrix fill-in (including backpointers)
for deriving length of longest common
subsequence.
- Rectangular (m + 1) x (n + 1) matrix;
fill-in proceeds from cell (1,1)
row-wise, column-wise, or
anti-diagonal-wise.
- Fill-in of an individual cell
involves consulting filled-in
cells in the 3-cell "overhang" to
left and above of that cell.
- Backpointer cells have value 1, 2, or 3
depending on which recursive (sub)case
was invoked.
- Derivation of an LCS involves matrix-fill in get
the length of a longest common subsequence
followed by traceback from cell D(|s|,|s'|)
for deriving a longest common subsequence.
Tuesday, January 28 (Lecture #6)
[Section 15.4]
- Algorithm Design Techniques (Cont'd)
- Dynamic Programming (Cont'd)
- Example: DP algorithm for Longest Common
Subsequence (LCS) (Cont'd)
Thursday, January 30 (Lecture #7)
[Sections 15.2-3]
- Algorithm Design Techniques (Cont'd)
- Dynamic Programming (Cont'd)
- Example: DP algorithm for Matrix Chain
Parenthesization (MCP)
- Review of 2-matrix multiplication: O(n^3) time
(n = max matrix dimension)
- Multiplication of (n x l) matrix M1 and
(l x m) matrix M2 requires n * l * m
multiplications and produces an n x m
matrix.
- 3-matrix multiplication: Parenthesization of
matrix "chain" for 2-matrix multiplication
can drastically affect the number of
individual element multiplications.
- Example: Given matrices M1 (2 x 5),
M2 (5 x 100), and M3 (100 x 2),
(M1 * M2) * M3
uses (2 * 5 * 100) + (2 * 100 * 2) = 1400
multiplication operations but (M1 * (M2 * M3)
uses (2 * 5 * 2) + (5 * 100 * 2) = 1020
multiplication operations.
- Recursive decomposition
- m(i,j) = minimum number of element
multiplications required to multiply
matrices i through j in the given chain.
- Let the dimensions of our n matrices be
encoded in in an (n+1)-length array p with
index starting at 0,
where the dimensions of the ith matrix,
1 <= i <= n, are p[i-1] x p[i].
- Value m(i, j) for i < j is the sum of
the values of the best two-way split of
matrix subsequence i through j plus
the cost of multiplying the matrices
produced by this split.
- Recurrence (recursive + base cases)
- m(i,j) = min_{i <= k < j} m(i,k) + m(k+1,j) +
p[i-1]p[k][p[j] for
i, j >= 1
- m(i,i) = 0 for i >= 1
- Note that this is the first recurrence
we've seen that involves a non-constant
number of subproblem decomposition choices.
- Matrix fill-in (including backpointers)
for deriving minimum number of
multiplications relative to optimal
matrix chain parenthesization.
subsequence.
- Ragged-bottom pyramid / B2 bomber
shape matrix; fill-in proceeds
from left to right in ascending rows.
- Fill-in of an individual cell
involves consulting filled-in
cells in the "boomerang" hanging
off that cell.
- Backpointer matrix cells have value
k at which matrix sequence
i .. j split into matrix
subsequences i .. k and
(k + 1) .. j.
Traceback is initiated from cell m(1,n) for an
for an optimal matrix parenthesization.
- Example: Optimal parenthesization of
matrix sequence M1 (2 x 3), M2 (3 x 5),
M3 (5 x 4), and M4 (4 x 5).
Full value and backpointer computations for
matrices m and b are given
here.
Observe that the above yields the optimal
parenthesization (((M1 M2) M3) M4).
- Example: Optimal parenthesization of
matrix sequence M1 (30 x 35), M2 (35 x 15),
M3 (15 x 5), M4 (5 x 10), M5 (10 x 20), and
M6 (20 x 25) (page 376).
- DP algorithm (table fill-in (page 375) +
traceback (page 377))
- Time complexity of matrix fill-in: (# cells) x (#choices per cell) x
(max # subproblems per choice) = (n(n - 1)/2) x (n - 1) x
2 = O(n^3).
- Time complexity of traceback = n - 1 = O(n) [longest
possible backpointer path from D[1,n|] to
base-case entry].
- Space complexity: # cells = n(n - 1)/2 = O(n^2)
- Food for thought:
- How does the above change if we want to
enumerate all possible MCP of given
matrix-chain?
- Can we do better spacewise when obtaining
a single MCP of a given matrix-chain?
- Can we do better spacewise if all we want
is the cost of a MCP of a given matrix-chain?
- Another important characteristic of problems whose
optimal substructure can be exploited by dynamic
programming (and indeed by divide-and-conquer and
greedy algorithms as well) is subproblem
independence, i.e., solutions to subproblems
do not share resources. This is important because
subproblem solutions can only be combined if they
are independent.
- Example: The existence (impossibility) of
dynamic programming algorithms for the unweighted
shortest (longest) simple path problems in directed
graphs (pp. 381-384).
- Recall that in a simple path, vertices cannot
repeat.
- USSP has the optimal substructure property.
- Consider a shortest path p between any two
vertices u and v incorporating an
intermediate vertex w (which may be u or v);
this can be decomposed into subpaths p1 and
p2 between u/w and w/v, respectively.
- If p is a shortest path between u to v then
then p1 must be a shortest path between
u and w (proof by contradiction: if there
was a shorter path p` between u and w, it
could be combined with p2 to create a path
shorter than p, which contradicts the
optimality of p).
- An analogous argumnent establishes the
optimality of p2.
- This recursive decomposition is the basis of
a shortest-path algorithm we will examine
later in this course.
- ULSP does not have the optimal substructure
property.
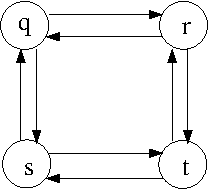
- Consider the following graph G:
Observe that the longest simple path between
q and t is q-r-t, but the longest simple path
between q and r (q-s-t-r) cannot be combined
with the longest simple path from r to t
(r-q-s-t) to get the longest simple path
from q to t because vertices repeat in
these two paths.
- Unlike USSP, subproblems in ULSP are not
independent, as they share resources (in
this case vertices) and cannot be patched
together to create solutions to larger
problems.
- ULSP does not have the optimal substrtucture
property and hence does not have cool DP or
Divide-and-Conquer
algorithms; however, might there be another route
to polynomial-time solvability for ULSP? As
we shall see later in this course, the answer
to this question is "probably not".
Tuesday, February 4
Tuesday, February 4 (Lecture #8)
[Section 15.2; Class Notes]
Thursday, February 6 (Lecture #9)
[Sections 16.1-16.2; Class Notes]
- Algorithm Design Techniques (Cont'd)
- Dynamic programming and divide-and-conquer algorithms
have enabled us to make many apparently difficult
problems solvable in low-order polynomial time. Can we
do still better? In certain cases, it seems that we can.
-
Consider binary search; it is a particularly interesting
example of
a D&C algorithm in which there is, at each point in the
computation, at most 1 choice and 1 subproblem to be
solved. In this case, the recursive computation collapses
to a path of recursive calls from the "root" problem to a
"leaf" subproblem.
- The subproblem structure for binary search is
unusually
simple, in that a choice can be made before
the subproblem is solved, i.e., the choice can be
made in a top-down, locally optimal (greedy) manner.
Compare this with other listed D&C and dynamic
programming algorithms, which solve subproblems in
a bottom-up manner and make choices only after all
necessary subproblems have been solved.
- As we we shall see, exploiting such greedy choices,
while implementable succinctly in code, comes at
the cost of increasingly complex proofs of correctness.
- Greedy Algorithms
- Example: Derivation of an optimal activity
selection in the example given above by the greedy
algorithm (page 420).
- Time AND space complexity (assuming we do not have
to sort the activities in S by finishing time) =
O(n).
- Food for thought:
- Can we do better spacewise when obtaining
a single optimal solution?
- Can we do better spacewise if all we want
is the value of the optimal solution?
- How does the above change if we want to
enumerate all possible optimal
activity selections?
- The Greedy Algorithm Cookbook [long form] (page 423)
- Determine the optimal structure of the problem,
i.e., derive the recursive decomposition.
- Develop a recursive solution, i.e., derive the
recurrence.
- Show that if we make the greedy choice then only
one subproblem remains.
- Prove that it is always safe to make the greedy
choice, i.e., that the greedy choice will always
be part of some optimal solution.
- Develop a recursive algorithm that implements
the greedy strategy.
- Convert the recursive algorithm to an iterative
algorithm
Tuesday, February 11
- Instructor ill; lecture cancelled..
Thursday, February 13
- Instructor ill; lecture cancelled..
Tuesday, February 18 (Lecture #10)
[Sections 16.2 and 23.1-23.2; Class Notes]
- Algorithm Design Techniques (Cont'd)
- The idea of greedy choice is seductive. In the absence of
proofs of optimality, it underlies many heuristic algorithms
whose performance is not gauranteed but have the virtues of
being fast and simple, e.g., hill-climbing local search
algorithms.
- Are there easier ways than that explored in the previous
lecture to derive and prove the optimality of greedy
algorithms?
- Greedy Algorithms (Cont'd)
- Example: The Minimum Spanning Tree problem
- DP algorithm.
- Based on problems of the form P[i] =
the cost of the minimum spanning forest
for edge-weighted graph G that has i edges
(note that what we ultimately want is
P[|V| - 1]).
- We can imagine a recurrence for P[i] in
which we add all possible edges to
solution-forests for P[i - 1] that connect
two formerly distinct components in the forest
and select those edges that result in
minimum-cost forests on i edges. To do this,
we need to associate the solution
spanning-forests
explicitly with P[i], i.e., we cannot
reconstruct them after matrix fill-in by
traversing backpointers.
- The resulting recurrence has a double
minimization over solution spanning-forests for
P[i - 1] and edges that can be added to
these forests, respectively.
- Can we do better? In particular, do we have to
evaluate all of the subproblems induced by all edge
choices at each point, or can we get away with a
single edge-choice and subproblem?
- Consider the following very useful property of
minimum spanning forests: Given such a
forest for a graph G, each minimum-weight edge
linking separate components in the forest must
be in some minimum spanning tree for G
(Theorem 23.1; see also Corollary 23.2).
Such an edge is said to be safe.
- What this means is that all we have to do is
choose a safe edge and evaluate the resulting
subproblem! This gets rid of the inner
minimization over edges in the recurrence;
moreover, as the
choice of a safe edge always leads to some
minimum spanning tree, we can also get rid of
the outer minimization over spanning-forests.
- ALGORITHM: Generic MST (page 626):
1. MSTGen(G = (V,E,w))
2. F = (V, {})
3. for (i = 1; i <= |V| - 1; i++)
4 Find a safe e in E for F = (V, E')
5. F = (V, E' u {e})
6. return F
- Under appropriate selections of safe edges,
this generic algorithm underlies both
of the classic minimum spanning tree algorithms
considered below.
- Kruskal's algorithm (pages 631-633)
- Start with trivial forest of G that just includes the
vertices in V; add edges greedily, minimum-weight
first, growing a minimum spanning forest that eventually
coalesces into a minimum spanning tree for G.
- ALGORITHM: Kruskal's MST Algorithm (page 631):
1. MSTKruskal(G, w)
2. A = {}
3. for each vertex v in V do
4. MAKE-SET(v)
5. sort the edges in E in nondecreasing order by weight
6. for each edge in (u,v) taken in nondecreasing order by weight do
7. if FIND-SET(u) <> FIND-SET(v) then
8. A = A u {(u,v)}
9. UNION(u,v)
10. return(A)
- Example: Example run of Kruskal's
algorithm (pages 632-633)
[Diagram]
- Note that this a direct implementation of
the generic MST algorithm above.
- Running time
= O(|V|(T(MAKE-SET)) + 2|E|(T(FIND-SET)) + |E|(T(UNION)) + SORT(|E|))
= O(|V|(T(MAKE-SET)) + |E|(T(FIND-SET)) + |E|(T(UNION)) + |E| log |E|)
= O(|V|(T(MAKE-SET)) + |E|(T(FIND-SET)) + |E|(T(UNION)) + |E| log |V|^2)
= O(|V|(T(MAKE-SET)) + |E|(T(FIND-SET)) + |E|(T(UNION)) + |E| log |V|)
- Prim's algorithm (pages 634-636)
- Start with a single vertex in G; add edges greedily,
minimum-weight first, growing minimum spanning tree
for successively larger subsets of V until you
have a minimum spanning tree for G.
- ALGORITHM: Prim's MST AQlgorithm:w
(page 634):
1. MSTPrim(G,w,r)
2. for each u in V do
3. key[u] = INFTY
4. pi[u] = nil
5. key[r] = 0
6. Q = BUILD(V)
7. while Q is not empty do
8. u = EXTRACT-MIN(Q)
9. for each v in adj[u] do
10. if v in Q and w(u,v) < key[v] then
11. pi[v] = u
12. key[v] = w(u,v)
- Example: Example run of Prim's
algorithm (page 635)
[Diagram]
- Note that in this algorithm (unlike
Kruskal's), the spanning forest has
exactly one non-trivial component with
edges at any point during processing.
- Running time =
O(T(BUILD) + |V|(T(EXTRACT-MIN)) +
|E|(T(DECREASE-KEY)))
- Note that Kruskal's and Prim's algorithms are, in a
broad sense, converses of each other -- by adding
minimum-weight edges,
Kruskal's algorithm coalesces a (initially trivial)
spanning forest for the given graph G into a spanning tree
for G and Prim's algorithm extends spanning tree for
successively larger subgraphs of G until it has a spanning
tree for G.
- Both of these algorithms are readily derivable by
intuition, e.g., the CS Unplugged family math
night experience; it is the elegant and sometimes
convoluted proofs of optimality that elevate
these algorithms from uncertain heuristics to
reliability.
The above suggests that there is typically a quicker way
of deriving a greedy algorithm than developing and
subsequently "pruning" a dynamic programming
algorithm, e.g.,
- The Greedy Algorithm Cookbook [short form] (pages 423-424)
- Cast the optimization problem as one in which we
make a choice and are left with one subproblem to
solve.
i.e., derive the recursive decomposition.
- Prove that there is always an optimal solution
that makes the greedy choice, so that the
greedy choice is always safe.
- Demonstrate optimal substructure (recursive
decomposition) by showing that, having made the
greedy choice, what remains is a subproblem with
the property that if we combine the optimal
solution to the subproblem with the greedy
choice we have made, we arrive at an optimal
solution to the original ptroblem.
- Derive the associated iterative algorithm
That being said, the examples given above are useful as they
show the intimate relationship between dynamic
programming and greedy algorithms.
The relationship between CST, DP, Divide-and-Conquer, and
Greedy algorithms:
Optimal
Substructure
AND
Independent
Subproblems?
/ \
/ YES \ NO
/ \
Repeated CST
Subproblems?
/ \
/ YES \ NO
/ \
Greedy D&C
Choice?
/ \
/ YES \ NO
/ \
Greedy DP
The differences that make related versions of a
problem amenable to
greedy algorithms instead of just dynamic
programming algorithms can be very subtle, and
do not appear to be (at this point in time,
anyway) either systematic or comprehensible (though
there is some theoretical work on this issue,
e.g., matroid theory (Section 16.4)).
Example: Versions of the Knapsack problem
that allow greedy and dynamic programming /
combinatorial solution-space tree
algorithms (pages 425-427).
- Consider the knapsack instance U = {u1, u2,u3)
with B = 50 such that s(u1) = 10, s(u2) = 20,
s(u3) = 30, v(u1) = 60, v(u2) = 100, and
v(u3) = 120.
- The optimal 0/1 knapsack load is {u2,u3} with
value v(u2) + v(u3) = 100 + 120 = 220. No
optimal solution can include u1, which would
be greedily selected by greatest value per
size-unit. Indeed, optimal solutions for
0/1 Knapsack must be computed by
DP or CST algorithms.
- The optimal fractional knapsack load is
all of u1, all of u2, and 2/3 of u3, which has
value (1.0 * v(u1) + (1.0 * v(u2) + (2/3 *v(u3) =
60 + 100 + 80 = 240. Indeed, optimal
solutions for Fractional Knapsack
can be easily computed by a trivial greedy
algorithm.
Potential exam questions
Thursday, February 20
Tuesday, February 25
- Midterm break; no lecture..
Thursday, February 27
- Midterm break; no lecture..
Tuesday, March 4 (Lecture #11)
[Sections 22.1-2]
- Went over In-Class Exam #1.
- Exploiting Data Structures
- The techniques we've seen so far use properties
of solution spaces to organize efficient searches
of these spaces; in many cases, we have lowered
time complexities from exponential to low-order
polynomial.
- A trivial lower bound on the time complexity of many
algorithms is a linear function of the given input
size as one must
read the complete problem input, cf. binary search.
To get as close as possible to this
bound, need to choose data structures that provide
best time complexities for operations required by
an algorithm.
- Example: Exploiting data structures to
solve the Minimum Spanning Tree problem
- Kruskal's algorithm
- Prim's algorithm
- Running time =
O(T(BUILD) + |V|T(EXTRACT-MIN)) +
|E|(T(DECREASE-KEY)))
- Running time relative to various data
structures for priority queues (see
here for more details about cited data structures):
|
Data Structure |
Time Complexity (Worst Case) |
| BUILD |
EXTRACT-
MIN |
DECREASE-
KEY |
Prim's
Algorithm |
|
| Array (Unsorted) |
O(n) |
O(n) |
O(n) |
O(|E||V|) |
| Linked list (Unsorted) |
O(n) |
O(n) |
O(n) |
O(|E||V|) |
| Array (Sorted) |
O(n log n) |
O(n) |
O(n) |
O(|E||V|) |
| Linked list (Sorted) |
O(n log n) |
O(1) |
O(n) |
O(|E||V|) |
| Search tree |
O(n) |
O(n) |
O(n) |
O(|E||V|) |
| Balanced search tree |
O(n) |
O(log n) |
O(log n) |
O(|E| log |V|) |
| Binary heap |
O(n) |
O(log n) |
O(log n) |
O(|E| log |V|) |
- There are several lessons encoded in the tables
above:
- To obtain the best overall set of running
times for a set of operations relative to
an abstract data type, a complex underlying
data structure may be required.
- When one is dealing with an algorithm that
only invokes a subset of the operations
relative to an abstract data type, the best
overall data structure implementing that
data type may not be appropriate -- rather,
one looks for a data structure that gives the
best running times for the required subset of
operations.
- An efficient algorithm is a collaboration
between an appropriate algorithm design technique
and one or more data structures whose operation-sets
are optimally efficient for the subset of operations
required by the algorithm. Hence,
need good knowledge of both algorithm design
techniques and data structures to create efficient
algorithms.
- An algorithm designer also needs a good knowledge of
the best-known algorithms for standard problems.
After all, who wants to reinvent the wheel?
- Such knowledge tends to be domain-specific. Let's
concentrate on the domain of graphs and standard
graph algorithms.
- Graph algorithms
- Why use graphs?
- Graphs are the natural way to represent any situation
in which there are entities and relationships
between entities.
- Representations of graphs (Section 22.1)
- Two basic choices:
- Adjacency list
- Adjacency matrix
- Adjacency list more compact for sparse graphs,
i.e., graphs such that |E| << |V|(|V| - 1)/2;
however, as they store only one bit per adjacency,
adjacency matrices better for non-sparse graphs.
- Common operations on graphs:
- next-adj(v): Return next vertex in enumeration
of vertices adjacent to v.
- adj(v, v'): Return TRUE if v is adjacent to v'
in G and FALSE otherwise.
- Representations differ in terms of the efficiency of
these operations.
|
Data Structure |
Time Complexity (Worst Case) |
| NEXT-ADJ |
ADJ |
| Adjacency List |
O(1) |
O(|V|) |
| Adjacency Matrix |
O(|V|) |
O(1) |
- As with any data structure, need to optimize graph
representation to algorithm in terms of number of
type of operations used.
- Graph traversal
- Graph traversal useful in two ways:
- Visit all nodes in a graph.
- Impose annotation / structure on the vertices
and/or edges of a graph that has subsequent
uses.
- Two types of graph traversal: breadth-first search
(BFS) and depth-first search (DFS); let us focus on
the former.
- Breadth-first search on general graphs (Section 22.2)
- Intuition:
Exploration of shells of vertices at successively
larger distances from a selected point.
- ALGORITHM: Basic BFS "chasis"
1. BFSBasic(G, s)
2. for each vertex u in G - {s} do
3. color[u] = white
4. color[s] = gray
5. Q = {}
6. ENQUEUE(Q, s)
7. while Q is not empty do
8. u = DEQUEUE(Q)
9. for each v in adj[u] do
10. if color[v] = white then
11. color[v] = gray
12. ENQUEUE(Q,v)
13. color[u] = black
- Interpretation of colors:
- black = fully explored (node + children)
- gray = partially explored (node only)
- white = unexplored
- Visualize as ink spreading from a central point
outwards along edges until it has reached all
vertices in a graph.
- Analysis of running time
- Running time = |V|O(1) + |Q|O(1) + |E|O(1) + T_tot(next-adj))
= |V| + |V|O(1) + |E| + T_tot(next-adj))
= O(|V| + |E| + T_tot(next-adj))
- Adjacency list: O(|V| + |E| + |E|) = O(|V| + |E|) time
- Adjacency matrix: O(|V| + |E| + |V|^2) = O(|V|^2) time
- Though |E| <= |V|(|V| - 1)/2 = O(|V|^2),
often keep |E|-term in expressions to
show running time relative to sparse
graphs.
- Did not analyze algorithm in terms of
rigorously-derived T(n) function --
worked less formally and directly in terms
of big-Oh behavior of individual algorithm
components.
- Did not analyze algorithm by nested control
structure -- had to reason about behavior
of algorithm as a whole to derive certain
quantities, e.g., total length of
queue over execution of algorithm.
Tuesday, March 4
Thursday, March 6 (Lecture #12)
[Sections 22.2 and 24.1]
- Graph algorithms (Cont'd)
- Graph traversal (Cont'd)
- ALGORITHM: Full BFS (page 595)
1. BFSFull(G, s)
2. for each vertex u in G - {s} do
3. color[u] = white
4. ** d[u] = INFTY
5. ** pi[u] = nil
6. color[s] = gray
7. ** d[s] = 0
8. Q = {}
9. ENQUEUE(Q, s)
10. while Q is not empty do
11. u = DEQUEUE(Q)
12. for each v in adj[u] do
13. if color[v] = white then
14. color[v] = gray
15. ** d[v] = d[u] + 1
16. ** pi[v] = u
17. ENQUEUE(Q,v)
18. color[u] = black
Starred (**) lines are those added relative to
basic BFS algorithm given previously.
- What are the pi and d arrays for?
- BFS defines a search tree based on all
vertices of G that is rooted at the start
vertex s; the pi-array defines the
node-parent relations in this tree.
- This search tree is structured such that
the length of the path from s to u in this
tree is the length of the shortest path
(in terms of # edges) between s and u
in G; the d-array contains these
shortest-path length values.
- Intuition behind proof of correctness for
d-values: If there were a
shorter path from s to v via some
vertex u, during exploration of children
of u, v would have previously been
colored gray!
- Can use BFS to derive shortest paths
(in terms of # edges on path) between a specified vertex s and all other
vertices in a graph.
- Example: Sample run of BFS algorithm
(page 596). [Diagram]
- Courtesy of the expanding-shell nature of
BFS, shortest paths once found are never
revised, cf., Dijkstra's algorithm (see
below).
- Note that Prim's algorithm for computing
minimum spanning trees is somewhat like BFS;
both are expanding a frontier outwards from
an initial vertex in the graph,
but while BFS expands this frontier uniformly
by distance from the start point, the expansion
by Prim is relative the the smallest-weight
edge extending into the frontier (this is done
by replacing an ordinary queue with an
appropriately-keyed priority queue).
- Shortest Paths in Edge-Weighted Graphs
- Assume edge-weights are specified in a matrix w(), i.e.,
w(u,v) is the weight of the edge between vertices u and
v in a given graph (= +INFINITY if there is no such
edge). Note that negative edge-weights are possible.
- Has many applications depending on how you interpret
the edge-weights, e.g., distances, costs.
- Can solve by applying edge-expansion and
ordinary BFS; however, this yields an exponential
time algorithm. Can we do better?
- Two types of problems:
- Single-source shortest paths
- All-pairs shortest paths
- Can further break down algorithms based on whether
or not they detect negative-weight cycles. Such
cycles are problematic because they render
shortest-paths estimates meaningless, e.g.,
can make length of path arbitrarily short by
appropriate number of traversals around the cycle.
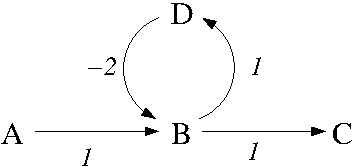
- Example: A graph with a negative-weight cycle.
Observe that in this graph, a shortest path from
A to C can always be made shorter by including one
more time around the negative-weight cycle B->D->B.
- Properties of shortest paths:
- Triangle inequality: d(s,v) <= d(s,u) + w(u,v)
- Shortest path has at most |V| - 1 edges,
i.e., can eliminate negative-, zero-,
and positive-weight cycles from shortest paths.
- Shortest paths satisfy the optimal substructure
property, i.e., given a shortest path
from s to v and a vertex u on this path, the
subpaths s->u and u->v are also shortest paths;
this means that there are many nice algorithmic
possibilities, i.e., DP, D&C, Greedy.
- The Relax operation
- ALGORITHM: Relax (pages 648-649)
1. InitSingleSource(G, s)
2. for each vertex v in adj[v] do
3. d[v] = INFTY
4. pi[v] = nil
5. d[s] = 0
6. Relax(u, v, w)
7. if (d[v] > d[u] + w(u,v)) then
8. d[v] = d[u] + w(u,v)
9. pi[v] = u
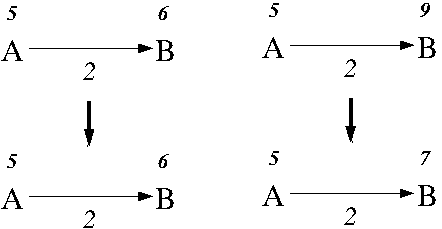
- Example: Two sample applications of the
Relax operation.
- The relax operation is trivial; however,
sequences of relaxations can be quite powerful.
- All algorithms we consider for shortest path
problems will essentially differ only in the
the order in which edges are relaxed and the
number of times each edge is relaxed.
Tuesday, March 11 (Lecture #13)
[Section 24.3]
- Graph Algorithms (Cont'd)
- Single-source shortest paths algorithms
- Dijkstra's algorithm (Section 24.3)
- This algorithm essentially applies relaxations in
a systematic matter to grow a set of vertices with
known shortest-path distances outwards from the
source vertex to encompass the whole graph. In
particular, relaxations are applied to vertices
(or rather, the adjacencies of those vertices)
as they are added to this set and can be seen as
extending out from the frontier of this region
into the remainder of the graph.
- ALGORITHM: Dijkstra (page 658)
1. Dijkstra(G, w, s)
2. Initialize-Single-Source(G, s)
3. S = {}
4. Q = V[G]
5. while Q is not empty do
6. u = EXTRACT-MIN(Q)
7. S = S u {u}
8. for each vertex v in adj[u] do
9. Relax(u, v, w)
- Example: Sample run of Dijkstra's
algorithm (no negative weight cycle).
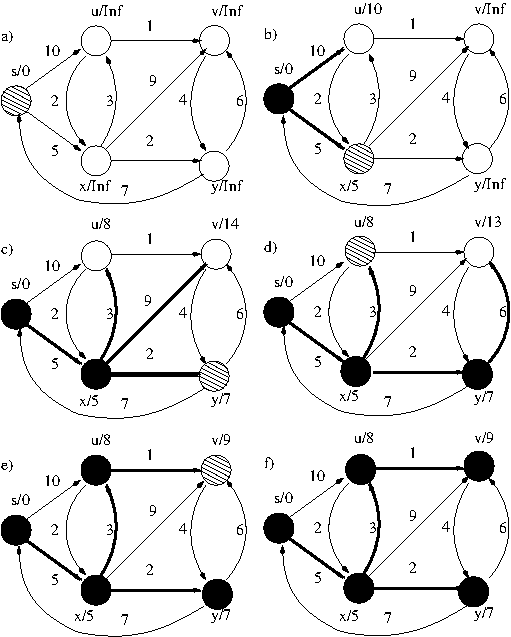
Part (a) shows the initial state of the graph
and subsequent parts show the graph after a
particular vertice's adjacencies have been
relaxed. Black vertices are fully relax-processed
and the shaded vertex is the vertex whose
adjacencies will be relaxed in the next part.
d-values are written next to vertex names and
pi-values are implicit in the thick edges.
- Note that Dijkstra's algorithm, unlike BFS, can
change the shortest path tree rooted at the start
vertex over an algorithm execution -- this is
because newly-encountered weighted edges can
revise previously-found shortest paths.
- Example: Sample run of Dijkstra's
algorithm (page 659).
[Diagram]
- Analysis of running time
- Running time
= T(INITIALIZE) + |V|T(EXTRACT-MIN) + |E|T(RELAX)
= T(INITIALIZE) + |V|T(EXTRACT-MIN) + |E|T(DECREASE-KEY)
- Runs in O(|E| log |V|) time relative to a
binary heap.
- Doesn't Dijkstra's algorithm look an awful lot
like Prim's algorithm for minimum
spanning trees? It should!
Try writing the code for the initialization and
relaxation procedures into Dijkstra's
algorithm, eliminating the S-lines (which are
not being used), and then comparing with Prim's
algorithm -- oddly enough, you'll see that
relaxation is a generalization of the key-value
adjustment done by Prim on lines 11 and 12,
e.g.,
1. DijkstraRewrite(G, w, s)
2. for each u in V do
3. d[u] = INFTY
4. pi[u] = nil
5. d[s] = 0
6. Q = V
7. while Q not empty do
8. u = EXTRACT-MIN(Q)
9. for each v in adj[u] do
10. if d[u] + w(u,v) < d[v] then
11. d[v] = d[u] + w(u, v)
12. pi[v] = u
- Dijkstra's algorithm cannot detect negative
cycles, and will produce
erroneous results if one or more such cycles
are present. Worse, this algorithm may fail
in the presence of negative-weight edges,
independent of whether these edges are part of
a negative-weight cycle.
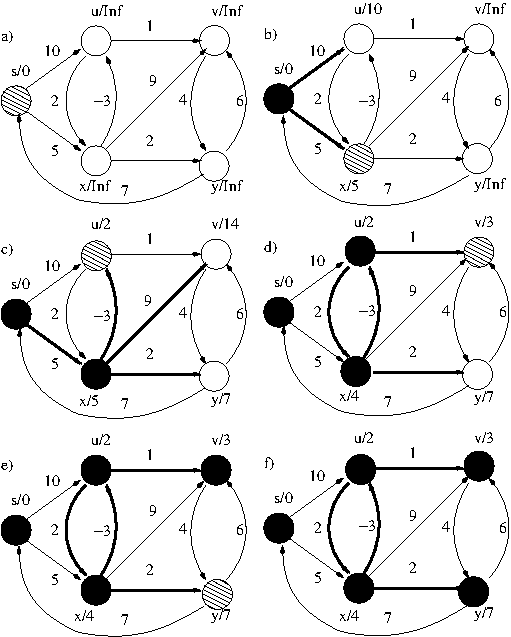
- Example: Sample run of Dijkstra's
algorithm (negative weight cycle).
- Dijkstra's
algorithm is fast, but at the price of
restricted applicability. Can we do better?
- The Bellman-Ford algorithm (Section 24.1)
- This algorithm essentially adopts the philosophy that
if you invoke relaxation often enough, all will be
well. Oddly enough, it turns out that if you relax
each edge in the graph |V| - 1 times, the d-values
associated with all vertices are guaranteed to settle
to the actual shortest-distance values. This
works because each round of relaxations
relaxes one edge further along a shortest path
and each shortest path has at most
|V| - 1 edges.
- ALGORITHM: `Bellman-Ford (page 651)
1. BellmanFord(G, w, s)
2. Initialize-Single-Source(G,s)
3. for i = 1 to |V| - 1 do
4. for each edge (u,v) in E do
5. Relax(u, v, w)
6. for each edge (u,v) in E do
7. if d[v] > d[u] + w(u,v) then
8. return FALSE
9. return(TRUE)
- Example: Sample run of Bellman-Ford
algorithm (no negative weight cycle).
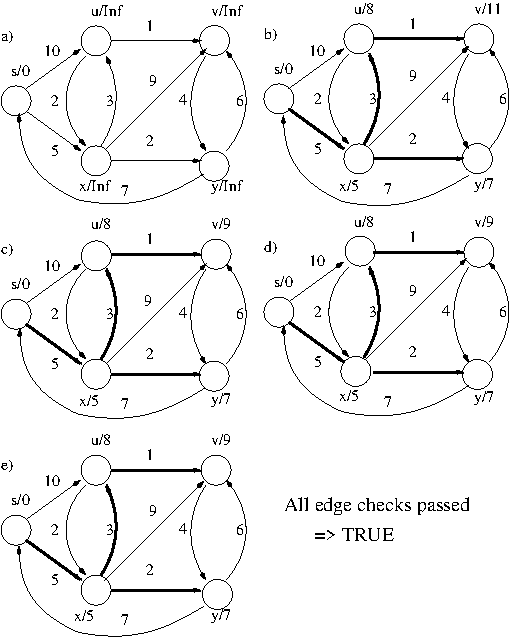
Edges are relaxed in the following order in each
relaxation-phase: (s,u). (s,x), (u,v), (u,x),
(u,y), (v,y), (x,u), (x,y), (y,s), (y,v).
d-values are written next to vertex names and
pi-values are implicit in the thick edges.
- Example: Sample run of the Bellman-Ford
algorithm (page 652).
[Diagram]
- Running time = O(|V||E|)
- This algorithm does (|V| - 1)|E| relaxations, as compared to
the |E| relaxations done by Dijkstra's algorithm,
and hence runs much slower. However, it has the
advantage of being able to detect negative-weight
cycles.
- The intuition behind this is almost the same as
for the Bellman-Ford algorithm in general as
given above -- in addition to propagating correct
shortest distances along a path, the
invoked relaxations propagate
the negative summed weights around negative-weight
cycles and dump these negative weights onto
regular paths, where the resulting screwup in the
relation between d-values of adjacent vertices can
be detected by a simple scan of all edges
(lines 7-9 of the algorithm)
- Shouldn't Dijkstra's algorithm be able to detect
negative-weight cycles by the same argument? I
suspect not, as Dijkstra's algorithm probably does
not invoke enough relaxations
to guarantee that the influences
of negative-weight cycles will necessarily be
dumped onto all (or even any) paths --
however, I could be wrong in this.
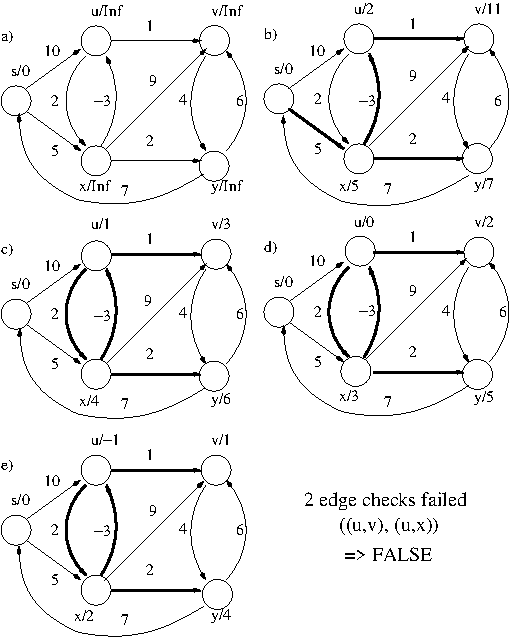
- Example: Sample run of Bellman-Ford
algorithm (negative weight cycle).
Note that the running times given for both Dijkstra's
algorithm and the Bellman-Ford algorithm assume
that the input graph is represented as an adjacency
list -- if the graph is instead represented as an
adjacency matrix, the running time of both
algorithms becomes O(|V|^3).
Thursday, March 13
Tuesday, March 18 (Lecture #14)
[Sections 25.1-2; Class Notes]
- Went over answers to in-class exam #2.
- Graph algorithms (Cont'd)
The Floyd-Warshall algorithm (Section 25.2)
Example: Sample run of the Floyd-Warshall
algorithm (page 690).
Running time = O(|V|^3)
Note that both of these algorithms are technically
operating on a 3-D matrix of size O(|V|^3); however,
as we only need
to save adjacent 2-D "slices" of this matrix,
we actually use O(|V|^2) space.
Note that the running times given for the three
algorithms above assume that the input graph is
represented as an adjacency matrix -- if the graph
is instead represented as an adjacency list, the
running times of each algorithm increase by a
a multiplicative factor of |V|!
INTERLUDE: A look at the mechanics of
Assignment #3.
Potential exam questions
Using the techniques we've talked about so far in this course,
we can often derive a polynomial-time algorithm for a problem
of interest and hence prove that this problem is solvable in
polynomial time, i.e., the problem is
(polynomial-time) tractable.
However, suppose we run across a problem for which we cannot
find a polynomial time algorithm, e.g., 0/1
Knapsack. Are we
just not thinking hard enough or is it really the case that
there isn't a polynomial-time algorithm for that problem,
i.e., the problem is (polynomial-time)
intractable?
Proving Polynomial-Time Intractability
Thursday, March 20 (Lecture #15)
[Sections 34.1-34.2; Class Notes]
- Proving Polynomial-Time Intractability (Cont'd)
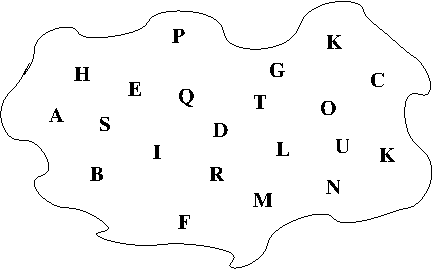
- Example: Fun with Reduction Webs I: Supose we have a
set of problems {A, B, C, D, E, F, G, H} with the following
reductions between them:
- A polynomial-time reduction from A to B
- A polynomial-time reduction from A to C
- An exponential-time reduction from B to D
- A polynomial-time reduction from C to E
- A polynomial-time reduction from D to F
- A polynomial-time reduction from E to B
- A polynomial-time reduction from E to G
- An exponential-time reduction from E to H
What do we know about the polynomial-time (un)solvability
of our problems relative to each of the following:
- A is polynomial-time unsolvable
- E is polynomial-time solvable
- F is polynomial-time solvable
- C is polynomial-time unsolvable
- H is polynomial-time unsolvable
- A is polynomial-time solvable
- G is polynomial-time unsolvable
- The upshot is, all we need is one polynomial-time intractable
problem to get the ball rolling! But where do we find such
a problem?
- Our quest for a "seed" polynomial-time intractable problem
will have two phases:
- Demonstrating that we need only focus on decision
problems.
- Isolating polynomial-time intractable decision
problems.
- Can use reductions to show that we only need to concern
ourselves with decision versions of problem -- can
usually show that polynomial-time solvability and
unsolvability propagates to cost and example versions.
- Example: Some computational problems that
we will be looking out (handout)
[PDF]
Vertex Cover (VC)
Input: An undirected graph G = (V,E) and an integer k > 0.
Question: Is there a vertex cover of G of size at most k,
i.e, is there a subset V' \subseteq V such that |V'| <= k
and for all edges (u,v) \in E, at least one of u and v is in V'?
Vertex Cover Cost (VC-C)
Input: An undirected graph G = (V,E).
Output:} The size of the smallest vertex cover of G.
Vertex Cover Example (VC-E)
Input: An undirected graph G = (V,E).
Output: One of the smallest vertex covers of G.
Clique
Input: An undirected graph G = (V,E) and an integer k > 0.
Question: Is there a clique in G of size at least k, i.e.,
is there a subset V' \subseteq V, |V'| >= k, such that for all
u, v \in V', (u,v) \in E?
Subset sum (SS)
Input: A set S of integers and an integer k \geq 0.
Question: Is there a subset S' of S whose elements sum to k?
Steiner tree in graphs (STG)
Input: An undirected graph G = (V,E), a set V' \subseteq V,
and an integer k > 0.
Question: Is there a tree in G that connects all vertices in
V' and contains at most k edges?
- Example Reductions between different vertex cover
problems.
- Vertex Cover (Decision) is solvable in polynomial
time if and only if
Vertex Cover (Cost) is solvable in polynomial time.
- if Vertex Cover (Cost) is solvable in
polynomial time then Vertex Cover (Decision) is
solvable in polynomial time:
Prove by giving a polynomial time reduction
from Vertex Cover (Decision) to Vertex Cover
(Cost):
VERTEX-COVER-DECISION(G, k)
if (VERTEX-COVER-COST(G) <= k) then
return(TRUE)
else
return(FALSE)
- If Vertex Cover (Decision) is solvable in
polynomial time then Vertex Cover (Cost) is
solvable in polynomial time:
Prove by giving a polynomial time reduction
from Vertex Cover (Cost) to Vertex Cover
(Decision):
VERTEX-COVER-COST(G)
k = 1
while not VERTEX-COVER-DECISION(G,k) do
k = k + 1
return(k)
- Vertex Cover (Decision) is solvable in polynomial
time if and only if
Vertex Cover (Example) is solvable in polynomial
time.
- if Vertex Cover (Example) is solvable in
polynomial time then Vertex Cover (Decision) is
solvable in polynomial time:
Prove by giving a polynomial time reduction
from Vertex Cover (Decision) to Vertex Cover
(Example):
VERTEX-COVER-DECISION(G, k)
if (cost(VERTEX-COVER-EXAMPLE(G))) <= k then
return(TRUE)
else
return(FALSE)
- If Vertex Cover (Decision) is solvable in
polynomial time then Vertex Cover (Example) is
solvable in polynomial time:
Prove by giving a polynomial time reduction
from Vertex Cover (Example) to Vertex Cover
(Decision):
VERTEX-COVER-EXAMPLE(G)
min_cost = 1
while not VERTEX-COVER-DECISION(G,min_cost) do
min_cost = min_cost + 1
k = min_cost
S = {}
G' = G
while |S| < min_cost do
for each vertex v' in V' do
G'' = (V' u {x}, E' u {(v',x)})
if (VERTEX-COVER-DECISION(G'',k)) then
S = S u {v'}
G' = G' - {v'}
k = k - 1
break
return(S)
- Reduction uses vertex x and edge attached to x as ``probe'' to see
if vertex v' is in the vertex cover. If it is, edge (v',x) is
covered by the current cover (VERTEX-COVER-DECISION(G'',k) =
TRUE); otherwise, x must be added to cover, creating a cover of
size k + 1, rendering VERTEX-COVER-DECISION(G'',k) = FALSE.
- Focusing on decision problems makes our lives much easier
when dealing with reductions. Indeed, we can make things
even simpler by using just one
type of reduction.
- A (polynomial time) many-one reduces to B if
there is a polynomial-time function f() that
transforms instances of A into instances of B such
that the answer to instance I of A is "yes" if and
only if the answer to instance f(I) of B is "yes".
- Example: A many-one reduction from decision problem A to decision problem B.
Tuesday, March 25 (Lecture #16)
[Sections 34.3-34.5; Class Notes]
- Proving Polynomial-Time Unsolvability (Cont'd)
- Example: Clique many-one reduces to
Vertex Cover
(Lemma 3.1, Garey and Johnson (1979))
- Relies on a nice graph-theoretic characterization
of cliques and vertex covers on the same set of
vertices.
- Define the complement Gc = (V,Ec) of a graph
G = (V,E) as the graph on V with edge-set
Ec = {(u,v) | (u,v) is not in E}.
- Given an instance (G,k) of CLIQUE, the reduction
constructs an instance (Gc,|V| - k) of VC.
- Prove that the given instance of CLIQUE has
answer "yes" iff the constructed instance of VC
has answer "yes":
- If the given instance of CLIQUE has
answer "yes" then the constructed instance of
VC has answer "yes": Consider a solution S
\subseteq V of size k to the given instance of
CLIQUE. As each pair of vertices in S is
connected by an edge in G, no pair of vertices
in S is connected by an edge in Gc. Hence,
V - S is a vertex cover of size |V| - k in the
constructed instance of VC.
- If the constructed instance of VC has
answer "yes" then the given instance of
CLIQUE has answer "yes": Consider a
solution S \subseteq V of size |V| - k in Gc
to the constructed instance of VC. Consider
S' = V - S. None of the vertices in S'
are connected by an edge in Gc (else, one of them
would have to be in the vertex cover). Hence,
there is an edge between each pair of
vertices in S' in G, and S' is a
clique of size k in the given instasnce of CLIQUE.
- Example: Subset Sum many-one reduces to 0/1 Knapsack
- Need decision version of 0/1 Knapsack:
0/1 Knapsack (decision version) (01KN)
Input: A set U of items, an item-size
function s(), an item-value function v(), and
positive integer B and k.
Question: Is there a subsets U' of U such that the
sum of the sizes of the items in U' is less
than or equal to B and the sum of the values of
the items in U' is at least k?
- Given an instance (S = {s1,..,sn},t) of SS,
construct an instance (U,s,v,B,k) of 01KN
such that U = {u1,..,un} where s(ui) = v(ui) = si,
1 <= i <= n, and B = k = t.
- Prove that the given instance of SS has
answer "yes" iff the constructed instance of
01KN has answer "yes":
- If the given instance of SS has answer
"yes" then the constructed instance of
01KN has answer "yes": Consider a solution
S' = {s'1,..,s'm} \subseteq S for the given
instance of SS. Construct a candidate
solution
U' for the constructed instance of 01KN
consisting of the items corresponding to the
selected numbers in S'. Observe that the
summed size and value of this solution is
t = B = k, meaning that U' is a solution.
- If the constructed instance of 01KN has
answer "yes" then the given instance of
SS has answer "yes": Consider a
solution U' to the constructed instance of
01KN. As item values and sizes are the
same, the solution size and value most be the
same. Thus, if the summed size is <= B and the
summed value is >= k, the summed size must
be B = k = t. Thus, one can easily construct
a solution for the given instance of
SS consisting of those integers in S
corresponding to items in U'.
- Example: Vertex Cover many-one reduces to
Steiner Tree in Graphs (Day, Johnson, and Sankoff (1986))
- Given and instance (G = (V,E),k) of VC
construct an instance (G' = (V',E'),V'',k') of STG
such that V' = {r} u {v'1,..,v'|V|} u
{e'1,..,e'|E|}, E' = {(r,v'i) | 1 <= i <= |V|} u
{(v'i,e'j) | vertex i is an endpoint of edge j in E},
V'' = {r} u {e'1,..,e'|E|}, and k' = k + |E|.
- This reduction requires that solutions to the
constructed instance of STG have a three-level
structure in which the top level is the root-vertex
r, the second level consists of vertices
corresponding to the edges in G, and the vertices
in the second level correspond to vertices in a
vertex cover for G.
- Prove that the given instance of VC has
answer "yes" iff the constructed instance of STG
has answer "yes":
- If the given instance of VC has
answer "yes" then the constructed instance of
STG has answer "yes": Consider a solution S
\subseteq V of size k for the given instance of
VC. For each edge e in E, let end(e)
be the endpoint of e in S (if they are both in
S, pick one arbitrarily). The tree in G'
consisting of V' and the vertices v'i
corresponding to vertices in S, along with the
edges linking these vertices to r and the
vertices e'j (that is, for each vertex e'j
corresponding to edge j in E, select edge
(e'j,end(j))), is a solution for the
constructed instance of STG that contains
k + |E| edges.
- If the constructed instance of STG has answer
"yes" then the given instance of VC
has answer "yes": A solution tree for
the constructed instance of STG of size k'
must have at least one edge from r ro some
v'i, but may have multiple pairs of edges
that form "wedges" ((v'i,e'j),(v'k,e'j) where
there is an edge (r,v'i) in the tree but no
edge (r,v'k)). Note that each wedge can be
replaced by the edge-pair ((r,v'k),(v'k,e'j))
without changing the cost of the tree. The
tree resulting after all such replacements
are made will have k edges from r to various
v'i and |E+| edges from various v'i to various
e'j. The vertices v'i correspond to vertices
in G that form a vertex cover of size k.
- Now we have to isolate a polynomial-time intractable
decision problem ... Oddly enough, reductions can help us
further in this, if used in tandem with problem classes.
- A problem class is a set of problems that has a
particular type of algorithm.
- Example: Class P is the set of all decision
problems that have polynomial-time algorithms.
- Use reductions to isolate the most computationally
difficult problems in a problem class C using the
notions of problem hardness and completeness.
- A problem A is C-hard if every problem in C reduces
to A -- if A is also in C, it is C-complete.
- C-hard problems are as hard as the hardest problems in C.
- C-complete problems are the hardest problems in C.
- Need a class C of decision problems that properly includes
(or is widely believed to properly include)
class P and for which we have hard / complete problems --
can then use these C-hard / -complete problems as basis for
reductions to show that problems of interest to us are not
in P and hence are not solvable in polynomial time.
- Example: Class EXPTIME is the set of all decision
problems that have exponential-time algorithms.
- Decision versions of all problems we've looked at so far
are in EXPTIME.
- Example: VERTEX COVER is in EXPTIME courtesy of the
algorithm that in O(2^{|V|}) time generates all subsets
of vertices in the given graph and then for each such
candidate vertex cover V' verifies in O(|E||V'|) time that
every edge in G has an endpoint in V'.
- Example: KNAPSACK is in EXPTIME courtesy of the
algorithm that in O(2^{|U|}) time generates all subsets
of item-set U and then for each such candidate
knapsack-load U' verifies in O(|U'|) time that
the summed size of the items in U' is
<= B and the summed value of the items in U' is >= k.
- Example: STEINER TREE IN GRAPHS is in EXPTIME
courtesy of the algorithm that in O(2^{|E|}) time generates
all subsets of edge-set E and for each such candidate
edge-set E' verifies in polynomial time that there are <= k
edges in E' and these edges form a tree in G that connects
all vertices in V'.
- Example: Class NP is the set of all decision
problems that have nondeterministic polynomial-time
algorithms, i.e., problems such that candidate
solutions can be verified in polynomial time.
- Decision versions of all problems we've looked at so far
are in NP.
- Example: VERTEX COVER, KNAPSACK, and STEINER TREE IN
GRAPHS are all in NP courtesy of the polynomial time
verification algorithms described above.
- NP is included in EXPTIME, P is included in EXPTIME, and P
is included in NP; however. while the first two of these
inclusions are proper, it is not known if the
third inclusion is proper (hence, the "P = NP?"
conjecture). Still, if EXPTIME-complete problems are
not useful to us, NP-complete problems might be.
- Example: Fun with Reduction Webs II: Supose we have a
set of problems {A, B, C, D, E, F, G, H} with the following
reductions between them:
- A polynomial-time reduction from A to B
- A polynomial-time reduction from A to C
- An exponential-time reduction from B to D
- A polynomial-time reduction from C to E
- A polynomial-time reduction from D to F
- A polynomial-time reduction from E to B
- A polynomial-time reduction from E to G
- An exponential-time reduction from E to H
What do we know about our problems relative to each of the
following:
- C is in P and E is NP-hard
- F is in P and A is NP-complete
- E is in P and G is NP-hard
- A is in P and F is NP-complete
- E is in P and C is NP-hard
- Now, all we need is one EXPTIME- or NP-hard problem
to start the ball rolling ...
Tuesday, March 25
Thursday, March 27 (Lecture #17)
[Section 35.1; Class Notes]
- Proving Polynomial-Time Unsolvability (Cont'd)
- One strategy for obtaining an initial C-hard problem X
for class C is to create a generic reduction from any
problem in C to X. How might one do this, though?
- Such a generic reduction is relatively easy to construct
for a class C of decision problems relative to
a language-recognition machine.
- Equivalence of decision problems and language
acceptance problems (map decision problem to
language of bitstrings consisting of
instance-encodings of all instances for which
answer is "yes").
- All problems in a class C of decision problems
relative to a language-recognition-machine M are
reducible to the following problem (which is also
typically itself in class C):
M-Acceptance
Input: Machine m of type M, input x.
Question: Does m accept, i.e.,
produce output "yes", on
input x?
- Example: P is the set of all decision problems
whose associated languages of "yes"-instances can be
recognized by a polynomial-time deterministic Turing
machine (DTM).
- Example: EXPTIME is the set of all decision
problems whose associated languages of "yes"-instances
can be recognized by a exponential-time deterministic
Turing machine (EDTM).
- Hence, we have one polynomial-time unsolvable problem --
EDTM-ACCEPTANCE! However, there are many problems of
interest for which one cannot construct reductions from
EDTM-ACCEPTANCE. Perhaps these problems are not
EXPTIME-hard; need something a bit less difficult,
computationally-speaking.
- Example: NP is the set of all decision problems
whose associated languages of "yes"-instances can be
recognized by a polynomial-time nondeterministic Turing
machine (NDTM).
- Nondeterministic TM may have arbitrary-choice
conditional statements; machine computes "yes" on
an input if there is some set of choices at
these arbitrary-choice conditionals that yields
an accepting computation for the given string.
- Arbitrary-choice conditionals = way of looking at all
possible solutions for a given instance within
an NDTM! Hence, nicely encodes notion of
polynomial-time verification.
- NDTM ACCEPTANCE is NP-complete!
- NDTM ACCEPTANCE may appear as unnatural a problem as EDTM
ACCEPTANCE at first glance; however, it is not.
- Two routes to useful NP-complete problems:
- Historical route
- NTDM ACCEPTANCE many-one reduces to CNF SATISFIABILITY
(Cook (1971))
- CNF SATISFIABILITY many-one reduces to 3-CNF
SATISFIABILITY (Karp (1972))
- The real genius of Karp (1972) was to show reductions from
CNF SATISFIABILITY and 3-CNF SATISFIABILITY to 18
problems of interest drawn from graph theory, scheduling,
and network design. This initial list of 18 has since
blossomed to several thousand (see the Appendix of
Garey and Johnson (1979) for a small but nonetheless
significant list of known NP-hard problems).
- Note that one of Karp's reductions (MINIMUM COVER to
STEINER TREE IN GRAPHS) is wrong;
however, with a slight modification,
the general idea works.
- Stresses the need for proofs of correctness for
reductions.
- Textbook route
- NDTM ACCEPTANCE many-one reduces to CIRCUIT
SATISFIABILITY (Lemma 34.6)
Circuit Satisfiability
Input: A circuit C.
Question: Is there a set of input-values for
C that
makes C output true on its output line?
- CIRCUIT SATISFIABILITY many-one reduces to GENERAL
SATISFIABILITY (Theorem 34.9)
General Satisfiability
Input: A combinational logic formula F.
Question: Is there a satisfying assignment
for F?
- GENERAL SATISFIABILITY many-one reduces to 3-CNF
SATISFIABILITY (Theorem 34.10)
- By transitivity of reductions, all problems above are
NP-hard. This thus makes for the second (and usually
far easier) strategy for proving a problem X C-hard --
that is, give a reduction from known C-hard
problem Y to X.
- Example: 3-CNF SATISFIABILITY many-one reduces to CLIQUE
(Theorem 34.11)
- Example: 3-CNF SATISFIABILITY many-one reduces to SUBSET SUM
(Theorem 34.15)
- As CLIQUE many-one reduces to VERTEX COVER, VERTEX COVER
many-one reduces to STEINER TREE IN
GRAPHS, SUBSET SUM many-one reduces to KNAPSACK,
and both CLIQUE and SUBSET SUM
are NP-hard, STEINER TREE IN GRAPHS and KNAPSACK are
NP-hard! Which means that these problems are not
solvable in polynomial time!
... Doesn't it? ...
- We don't know whether or not P is properly
contained in NP. Hence, there must always be a
qualifying clause attached to an interpretation of an
NP-hardness result -- namely, an NP-hard problem X is
not solvable in polynomial time unless P = NP.
- To this day, it is not known if P = NP or not -- however,
the best
evidence that P != NP is that no-one has yet found a
polynomial-time algorithm for an NP-hard problem.
- All this is well and good; however, the inconvenient
fact remains that even if a problem is NP-hard, we
still need to be able to solve it.
- Are there alternatives to exponential-time
optimal-solution algorithms for NP-hard problems? Yes,
there are! To see why, we need to understand
exactly what an NP-hardness result means:
if a problem is NP-hard
then there is no deterministic algorithm
running on a Turing machine
that gives optimal solutions
for all instances of the problem
in polynomial time
unless P = NP
- Note that there may still be usable
algorithms that violate one or more of the
italicized clauses above, e.g.,
polynomial-time randomized optimal-solution
algorithms, polynomial-time deterministic
approximate-solution algorithms.
- There are many such options; we will look at several
of them in our remaining lectures.
Tuesday, April 1 (Lecture #18)
[Class Notes]
- Dealing with Polynomial-Time Intractability
- Most of the options considered below have their own
computational complexity theories based on problem classes
encoding different notions of problem tractability.
- One can often infer cross-option (in)tractability results
by examining inclusion and intersection properties
of these classes; such structural complexity analyses
are valuable complements to the problem-oriented
complexity analyses that are our focus here.
- Let us first consider options based on computing
architectures different than classical single-processor
deterministic Turing machines.
- Parallel algorithms (Greenlaw et al (1995))
- Algorithms that invoke multiple processors.
- Given n processors, can speed up computation
by a factor of n in best case (linear
speedup);
is often much worse due to communication overhead
required to co-ordinate processors. Moreover, may
not be applicable to problems whose computation
is inherently serial, e.g., pregnancy.
- Is probably only practical to assume polynomial
(in size of input) number of processors with
logarithmic time on each processor; problems solvable
under such a scheme are in NC (Nick (Pippinger)'s Class). Though
NC \subseteq P, it is not known if NC is equal to P,
let alone NP -- indeed, it is widely believed that
NC is a proper subset of P and hence not a viable
option for solving NP-complete problems.
- Upshot: good for speeding up
computations by a constant factor -- this is often
good enough in practice but of little use as
input size goes to infinity.
- Polynomial-time randomized algorithms (Motwani and Raghavan (1995))
- Algorithms that are allowed to make random choices; in
conjunction with assumption of various distributions
(typically uniform) on the space of inputs, can
derive algorithms with an expected probability of
producing a correct (optimal) answer or an expected
running time.
- Two types of algorithms:
- Monte Carlo: Running time fixed,
expected probability of producing a correct
(optimal) answer (you don't know if you'll
win).
- Las Vegas: Expected running time,
produces correct (optimal) answer (you don't
know when you'll win).
- Problems solvable by polynomial-time Las Vegas and
(well-behaved) Monte Carlo algorithms are in classes ZPP
and BPP, respectively, respectively. As ZPP \subseteq
BPP and it is strongly conjectured that P = BPP, if
an NP-hard problem is in ZPP or BPP then P = NP.
Hence, polynomial-time randomized algorithms in ZPP and
BPP are probably not viable options for NP-hard problems.
- Randomized techniques are typically used to give faster
algorithms for problems
already known to be solvable in low-order polynomial
time, e.g., a O(|V| + |E|) expected time
Las Vegas algorithm for deriving minimum spanning
trees (Section 10.3, Motwani and Raghavan (1995)) and
a O(|E| log_8 |V| log |W|) expected
time Las Vegas algorithm for deriving shortest paths
in edge-weighted graphs that may contain
negative-weight cycles (Bernstein et al (2025)).
- Also useful for certain problems not known to be
in P, e.g., the Miller-Rabin Monte Carlo
algorithm for primality testing (Section 31.8).
- Quantum algorithms (Aaronson (2007))
- Algorithms that invoke quantum processes like
entanglement to do massively parallel computations
on arrays of qubits (quantum bits).
- As each qubit exists in multiple states between 0
and 1 over the course of the computation, an
array of n qubits can simultaneously consider a
solution space of size 2^n.
- Due to the probabilistic nature of quantum
phenomena, error during computation is
inevitable and the computation must be structured
so the error is manageable.
- Problems solvable by polynomial-time bounded-error
quantum algorithms are in class BQP. Though P and
a portion of NP are in BQP (courtesy of efficient
quantum algorithms for NP problems like factoring),
it is not known if any NP-hard problem is in BQP.
Moreover, it is conjectured that BQP extends "sideways"
and incorporates problems that are not in NP.
- Upshot: quantum algorithms are very good at speeding
up many problems in NP but may not be a viable option
for solving NP-complete problems.
- The above suggests the following somewhat disspiriting
complexity landscape wrt non-classical computation options:
- Let us now consider options based on relaxations of
optimal-solution algorithms.
- Polynomial-time heuristic algorithms (Gonzalez (2007))
- Algorithms that are not required to produce
optimal solutions, i.e., algorithms that
give some solution quickly.
- Three general approaches:
- Hill-climbing (local optimization / greedy
heuristic)
- Simulated annealing (physics metaphor)
- Genetic algorithms (biological metaphor)
- Polynomial-time heuristic are frequently used to get
solutions (of uknown "goodness") quickly for NP-hard
problems.
Thursday, April 3 (Lecture #19)
[Class Notes]
- Dealing with Polynomial-Time Intractability (Cont'd)
- Polynomial-time bounded-cost approximation algorithms
(Ausiello et al (1999); Section 35)
- ALGORITHM: A 2-approximation algorithm for
KNAPSACK (Garey and Johnson (1979), page 135)
- Without loss of generality, assume that each
item in U has size <= B, i.e., each
item can individually fit in the knapsack.
1. 01KNApprox(U,s,v,B)
2. Order items in u in decreasing ratio of value/size, i.e.,
v(u1)/s(u1) >- v(u2)/s(u2) >= ... >= v(un)/s(un)
3. U' = {}
4. for i = 1 to n do
5. if size(U') + s(ui) <= B then
6. U' = U' u {ui}
7. max = 1
8. for i = 2 to n do
9. if v(u_max) < v(ui) then
10. max = i
11. if (value(U') > v(u_max))
12. return(U')
13. else
14. return({u_max})
- Very few problems have additive approximation
algorithms.
- Example: If P != NP then there is no
polynomial time approximation algorithm with
an additive polynomial factor p(|I|) for KNAPSACK
(Theorem 6.6, Garey and Johnson (1979)).
- Given an instance I of KNAPSACK, create a new
instance I' such that v'(ui) =
(p(|I|) + 1)v(ui). It is obvious that C_O(I') =
(p(|I|) + 1)C_O(I). As all solution values
for I' are multiples of p(|I|) + 1 and
solution values are integers, C_O(I') -
C_A(I') <= p(|I|) = 0. As any solution for I'
is also a solution for I, the approximation
algorithm actually produces an optimal solution
for KNAPSACK in polynomial time, which (as
KNAPSACK is NP-complete) implies that P = NP.
- Few problems have FPTAS or PTAS -- KNAPSACK is
one of them (Garey and Johnson (1979),
pages 135-137).
- Use appropriately-defined reductions and complexity
classes to show that certain types of approximation
algorithms do not exist for certain problems,
e.g., use of MAX SNP-hardness relative to
polynomial-time L-reducibility to show that
VERTEX COVER and STEINER TREE IN GRAPHS do not
have PTAS unless P = NP.
- Fixed-parameter algorithms
(Downey and Fellows (1999))
- An algorithm whose non-polynomial running time
terms are expressed in terms of aspects of the
input that are of very small size in practice.
- Such algorithms are of interest, as many
problems that are polynomial-time unsolvable in
general occur in restricted versions in practice.
- Example: 3-D Robot Motion Planning
3-D Robot Motion Planning (3DRMP)
Input: A jointed robot R, a set of obstacles
O embedded in some 3-D environment E,
and initial and final positions p_I
and p_F of R in E.
Question: Is there a sequence of robot
motions that move R from p_I to p_F
without colliding with any obstacles
in O?
- Is PSPACE-hard for arbitrary robots and
environments. However, robots are seldom
arbitrary -- for example, the number of
joints in a robot arm <= 7 and the number of
joints in a robot hand <= 20.
- Is there a non-polynomial-time algorithm for
3DRMP whose non-polynomial terms are expressed
as functions of the number of joints in
the robot?
- Parameterized analyses may also help uncover structures
in typically-encountered inputs that explain the
unexpectedly good performance in practice of certain
algorithms for hard problems, e.g., SAT solvers,
the Simplex algorithm for linear programming.
- Two key notions:
- A parameterized (decision) problem has
instances of the form (x,k) where x is the
main part and k is the parameter.
- A parameterized problem is fixed-parameter
tractable if it has an algorithm whose
running time is O(f(k)x^c) where f() is an
arbitrary function and c is some constant
independent of k.
- Example: (k)-VERTEX COVER is the parameterized
version of VERTEX COVER in which the size k of the
vertex cover is the parameter.
- Example: (k)-CLIQUE is the parameterized
version of CLIQUE in which the size k of the clique
is the parameter.
- Example: (d)-3DRMP is the parameterized
version of 3DRMP in which d, the number of joints
in the robot, is the parameter.
- Show fixed-parameter tractability of a parameterized
problem by giving a fixed-parameter algorithm for
that problem.
- ALGORITHM: A fixed-parameter algorithm for
(k)-VERTEX COVER
1. VCoverFP(G,k)
2. L = ({},G)
3. VC = {}
4. for i = 1 to k do
5. for each item(S',G') in L do
6. select arbitrary edge e = (u,v) in E'
7. if G - {u} is empty then
8. VC = VC u {S' u {u}}
9. else
10. L = ({S' u {u}}, G - {u})
11. if G - {v} is empty then
12. VC = VC u {S' u {v}}
13. else
14. L = ({S' u {v}}, G - {v})
15. return(VC)
- Implicitly creates binary search tree of
depth k and spends O(|V| + |E|) time
processing each node in that tree; hence,
algorithm runs in O(2^k(|V| + |E|)) time.
- Show that parameterized problems are not
fixed-parameter tractable by showing these
problems complete or hard for the appropriate
classes of problems that are either known or
strongly conjectured to properly include FPT,
the class of all fixed-parameter tractable
parameterized problems.
- Example: (k)-CLIQUE is W[1]-complete and
hence is not fixed-parameter tractable unless
FPT = W[1].
- Example: (d)-3DRMP is W[SAT]-hard and
hence is not fixed-parameter tractable unless
FPT = W[SAT] (Cesati and Wareham (1995)).
- Parameters can be combinations of aspects, so single
fixed-parameter tractability or intractability
results relative to particular parameters are
spurs to further research ...
One can also combine two or more options above to create
other tytpes of algorithms, e.g., parameterized randomized,
parameterized quantum, parameterized
bounded-cost approximation; research on such options
is ongoing and may yield more options for dealing
with NP-complete problems.
The Future of Algorithm Analysis
- Worst-case time complexity has served us well; however,
there are undeniable problems:
- Asymptotic behavior may only matter at absurdly large input
sizes.
- Worst-case behavior may only hold for a very small
and infrequently-encountered set of inputs.
- Absurdly large constants may be hidden in the
big-Oh notation.
- Deriving bounds on running time is very difficult for
complex algorithms.
- Machine model underlying asymptotic worst-case
complexity is inadequate, i.e., does not accomodate
memory hierarchy or multiple processors.
- The last of these problems is being worked on (Daily (2022));
wrt the remaining problems, we need to balance theoretical
analysis with implementation of and well-designed
experiments on the behavior of algorithms => experimental
algorithmics! (Moret (1999))
- Example: Experimental study of MST algorithms.
- Examined a variety of algorithms across a variety of
platforms (computers / operating systems /
compilers).
- Accounted for platform-dependent effects
by comparing algorithm on each platform against
simple linear-time graph-traversal algorithm with
same memory-access patterns, e.g., graph
traversal.
- Prim's algorithm with heap priority queue
performed best => when algorithms get sufficiently
complex, theoretical logarithmic-factor improvements
do not matter in practice.
- Implementation of Prim's algorithm sped up 10x over
course of experiments.
- Benefits of experimental algorithmics:
- Better assessment of relative utility of algorithms.
- Better implementations of algorithms.
- Improved theories for assessing algorithm efficiency ...
... Which brings us back, tired but hopefully wiser, to where
we started in the first lecture of this course ...
Potential exam questions
Tuesday, April 8
To travel is to go far.
To go far is to return.
- Cool proverb off old record album cover
References
Unless otherwise stated, all references above are to Cormen
et al. (2009).
- Aaronson, S. (2007) "The Limits of Quantum." Scientific
American, 298(3), 62-69.
- Ausiello, G., Crescendi, G. Gambosi, V. Kahn, A. Marchetti-Spaccamela,
and M. Protasi (1999) Complexity and Approximation of
Combinatorial Approximation Problems and their Approximability
Properties. Springer; Berlin.
- Brassard, G. and Bratley, P. (1996) Fundamentals of
Algorithmics. Prentice-Hall; Englewood Cliffs, NJ.
[Abbreviated above as B&B]
- Bernstein, A., Nanongkai, D., and Wulff-Nilsen, C. (2025)
"Negative-weight single-source shortest paths in near-linear time."
Communications of the ACM, 68(2), 87-94
Cesati, M. and Wareham, H.T. (1995) "Parameterized Complexity
Analysis in Robot Motion Planning." In Proceedings of the 25th IEEE
International Conference on Systems, Man, and Cybernetics: Volume 1.
IEEE Press; Los Alamitos, CA. 880-885.
- Cook, S. (1971) The complexity of theorem proving procedures.
In Proceedings of the Third Annual ACM Symposium on Theory of
Computing. ACM Press; New York. 151-158.
- Cormen, T.H., Leiserson, C.E., Rivest, R.L., Stein, C. (2009)
Introduction to Algorithms. Third Edition. The MIT Press;
Cambridge, MA. [Abbreviated above as CLRS]
- Daily, W. (2022) "Point/Counterpoint: On the Model of Computation."
Communications of the AC M, 65(9), 30-32.
[PDF]
- Downey, R.G. and Fellows, M.R. (1999) Parameterized
Complexity. Springer-Verlag; Berlin.
- Garey, M.R. and Johnson, D.S. (1979) Computers and
Intractability: A Guide to the Theory of NP-Completeness.
W.H. Freeman; San Francisco, CA.
- Gonzalez, T. F. (2007). Handbook of Approximation Algorithms and
Metaheuristics. Chapman and Hall/CRC.
- Greenlaw, R., Hoover, H. J., and Ruzzo, W. L. (1995) Limits to
Parallel Computation: P-completeness Theory. Oxford University
Press.
- Moret, B.M. (1999) "Towards a discipline of experimental
algorithmics." In Data Structures, Near Neighbor Searches, and
Methodology, DIMACS. 197-213.
- Karp, R.M. (1972) Reducibility among combinatorial problems. In
R.E. Miller and J.W. Thatcher (eds.) Complexity of Computer
Computations. Plenum Press. 85-103.
- Motwani, R. and Raghavan, P. (1995) Randomized Algorithms.
Cambridge University Press.
Created: October 18, 2024
Last Modified: April 3, 2025