- Algorithms as technology: Algorithms are at least as (and sometimes more) important to efficient computing as traditional electronic technologies, e.g., microprocessors, memory chips.
- Desirable properties of a measure of algorithm efficiency:
- Machine independent.
- Function of input size.
- Mathematically tractable, i.e., can be derived (relatively) easily for any algorithm.
- Useful for both assessing individual and comparing groups of algorithms.
- For most of this course, we will focus on efficiency wrt algorithm running time; however, we will occasionally mention other measures, i.e., space (computer memory).
- The road from actual running time to asymptotic worst-case time
complexity -- necessary lies (or rather, abstractions):
C(x) T(n) T(n) O(g(n)) Actual Abstract (Exact) Worst-Case Asymptotic Running -----> Running -----> Time -----> Time -----> Worst-Case Time Time Complexity Complexity Time Complexity Instruction Input Size Worst-Case Asymptotic Counts Selection Notation - Let's look at various concepts and techniques mentioned above in more detail.
- Counting instructions
- Motivated by the need for "machine" (computer hardware / operating system, programming language) -independent measure of algorithm efficiency.
- Basic instructions in a program can have a wide range of running times. Can indicate this in an analysis by assigning a separate constant for the running time of each kind of instruction; is accurate, but very cumbersome.
- We will assume that each kind of basic instruction runs in 1 time unit. Is not accurate but does simplify analyses; moreover, can be justified by our ultimate focus on asymptotic time complexity.
- We will assume a RAM model of memory in which all stored elements are accessible in 1 time unit. Is not accurate, as we ignore memory hierarchy; however, does simplify analyses.
- Input size.
- Motivated by the need to organize set of instruction-counts over the space of all inputs.
- Assumes a "reasonable" encoding of inputs, e.g., numbers stored in binary (pages 1055-1057; see also Chapter 2, Garey and Johnson (1979)).
- Isolate one or more parameters that describe amount of memory used to store input, e.g., length of a given list, the number of vertices in a given graph.
- Hard to define formally; acquired informally via experience doing time complexity analyses.
- We will assume where possible that we are dealing with small numbers in the input that fit inside a single computer-memory "word"; hence, the size of numbers in the input need not be a parameter in the input size.
- Time Complexity
- Time complexity = instruction-count stated as function of input size.
- Two general methods to deriving a time complexity
function for an algorithm:
- Compute counts for individual instructions and add together to derive function.
- "Grow" function by starting at innermost level of nesting in algorithm and working outwards.
Which method you use depends on the intricacy of the given algorithm.
- Individual assignment statements count as a single instruction, regardless of the complexity of the expression on the right-hand size.
- Each type of control-structure has its own rule for counting instructions.
- while-loop rule: #iter(body + 1) + 1
- The first "1" in the expression is for the evaluation of the loop-execution condition (to TRUE) for the executions of the loop body, and the second "1" is for the final evaluation of the loop-execution condition (to FALSE) when the loop terminates.
- Example: while-loop.
- Example: Example Algorithms #1 and #2 (tc_examples_1.txt)
- for-loop rule: #iter(body + 2) + 2
- The first "2" in the expression is for the evaluation of the loop-execution condition (to TRUE) and increment of the index variable for the executions of the loop body, and the second "2" is for the initialization of the index variable before the loop starts and the final evaluation of the loop-execution condition (to FALSE) when the loop terminates.
- This is very clearly seen if you rewrite a for-loop as the equivalent while-loop.
- Example: for-loop.
- Example: Doubly-nested for-loop: the selection sort algorithm (tc_sorting.txt)
- Worst-Case Time Complexity
- Programs involving loops and simple statements naturally give time complexity functions such that every input of a particular size runs in the same time; unfortunately, once we allow arbitrary while and if-then-else statements, different inputs of the same size may run in different times, e,g., sorting algorithms on sorted and unsorted lists of the length.
- Need to summarize set of running times for each
input size s by a single number. There are
three options:
- Average-case, e.g., average running time relative to some probability distribution over all inputs of size s; useful in practice but hard to compute.
- Best-case, e.g., lowest running time over all inputs of size s; easy to compute but not that useful in practice.
- Worst-case, e.g., highest running time over all inputs of size s; easy to compute and useful in practice -- moreover, simplifies analyses (see rule for if-then-else below).
- Worst-case time complexity functions are both useful and usable; hence, are most commonly in practice.
- if-then-else-statement rule: max(if-body, else-body) + 1
- Example: Two analyses of Example Algorithm #3 (tc_examples_1.txt)
- Example: the linear and binary search algorithms (tc_searching.txt)
- Example: the bubble and insertion sort algorithms (tc_sorting.txt)
- Asymptotic notation
- Used to smooth and simplify time complexity functions; assumes input size goes out to infinity, and that simplification can be stated in terms of "essential" behavior of function in the limit.
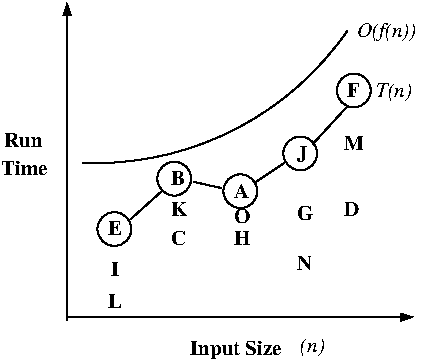
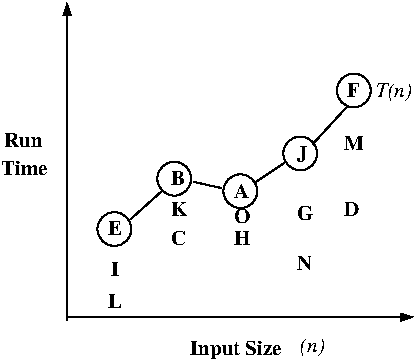
- What makes a function g(n)) a useful and
smooth upper bound of a time complexity function
function g(n) ?
- g(n) upper-bounds f(n):
-
f(n) <= g(n) for all n > 0.
- g(n) upper-bounds f(n) after
initial "bumpy" portion:
-
f(n) <= g(n) for all n > n0 for
some n0 >= 0.
- g(n) upper-bounds f(n) after
initial "bumpy" portion under arbitrary
machine model:
-
f(n) <= c * g(n) for all n > n0 for
some c > 0 and n0 >= 0.
This allows (to a degree) for instructions whose running-times differ by a constant multiplicative factor on different machines.
- g(n) upper-bounds f(n):
- Asymptotic upper bounds: Big-Oh notation
(O(g(n))).
- Example: T(n) = 3n^2 + 4n + 5 is O(n^2) (big_Oh.txt)
- One could derive the required constant c by fancy algebra; I prefer to set c to the sum of the positive coefficients -- it's very dirty but it's also quick.
- Example: T(n) = 3n^2 + 4n + 5 is not O(n) (big_Oh.txt)
- Try to avoid ludicrously loose upper bounds.
- Example: T(n) = 2n is O(n^57)
- Relationship between informal "T(n) is O(g(n))" definition and "O(g(n)) as the set of all g(n)-upper-bounded functions" definition given in textbook; keep the latter in mind, but the former is colloquial CS usage. May stem from algorithm-centric and math-centric views of asymptotic notation, respectively.
- Asymptotic lower bounds: Omega notation
(OMEGA(g(n))).
- Example: T(n) = 3n^2 + 4n + 5 is OMEGA(n^2) (big_OMEGA.txt)
- Example: T(n) = 3n^2 + 4n + 5 is not OMEGA(n^3) (big_OMEGA.txt)
- Example: T(n) = 3n^2 + 4n + 5 is not OMEGA(n^3)
- Try to avoid ludicrously loose lower bounds.
- Example: T(n) = 2n^57 is OMEGA(n)
- Asymptotic exact bounds: Theta notation (THETA(g(n))).